 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCFDNet: A Generalizable Foggy Stereo Matching Network with Contrastive Feature Distillation
Paper and Code
Feb 29, 2024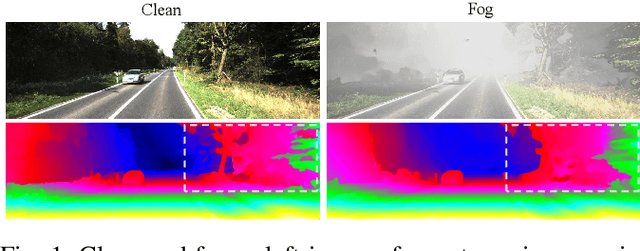
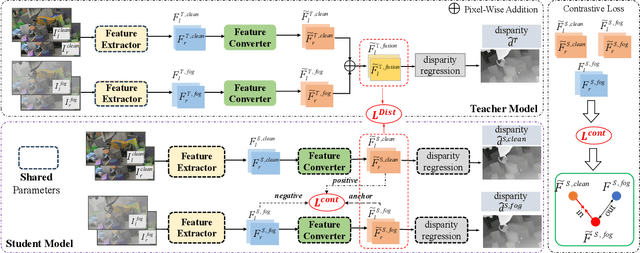
Stereo matching under foggy scenes remains a challenging task since the scattering effect degrades the visibility and results in less distinctive features for dense correspondence matching. While some previous learning-based methods integrated a physical scattering function for simultaneous stereo-matching and dehazing, simply removing fog might not aid depth estimation because the fog itself can provide crucial depth cues. In this work, we introduce a framework based on contrastive feature distillation (CFD). This strategy combines feature distillation from merged clean-fog features with contrastive learning, ensuring balanced dependence on fog depth hints and clean matching features. This framework helps to enhance model generalization across both clean and foggy environments. Comprehensive experiments on synthetic and real-world datasets affirm the superior strength and adaptability of our method.