 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapturing Hand Motion with an RGB-D Sensor, Fusing a Generative Model with Salient Points
Paper and Code
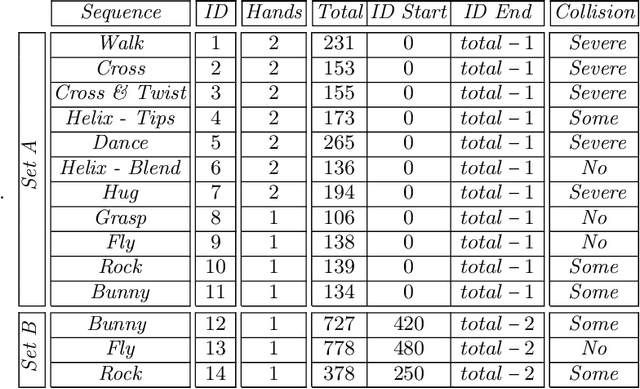
Hand motion capture has been an active research topic in recent years, following the success of full-body pose tracking. Despite similarities, hand tracking proves to be more challenging, characterized by a higher dimensionality, severe occlusions and self-similarity between fingers. For this reason, most approaches rely on strong assumptions, like hands in isolation or expensive multi-camera systems, that limit the practical use. In this work, we propose a framework for hand tracking that can capture the motion of two interacting hands using only a single, inexpensive RGB-D camera. Our approach combines a generative model with collision detection and discriminatively learned salient points. We quantitatively evaluate our approach on 14 new sequences with challenging interactions.