 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Autonomous Vehicles Identify, Recover From, and Adapt to Distribution Shifts?
Paper and Code
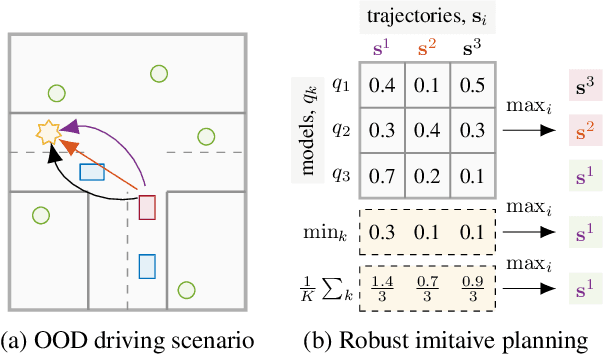
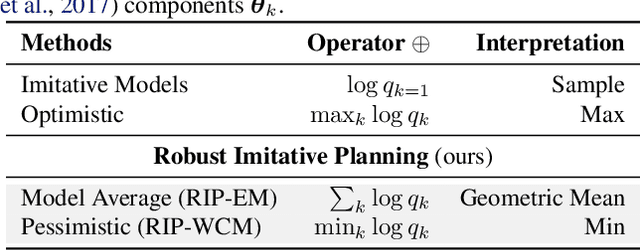
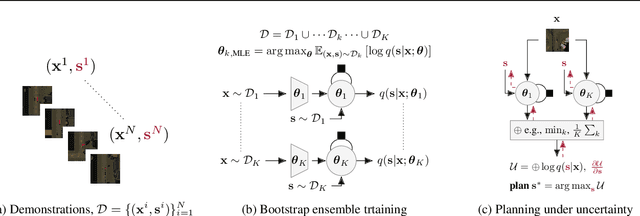
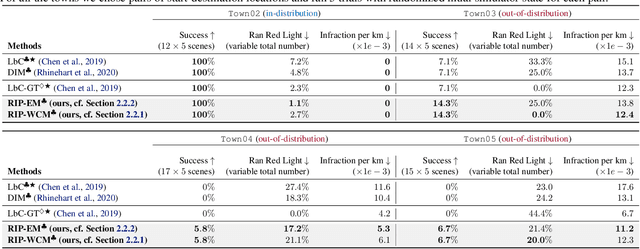
Out-of-training-distribution (OOD) scenarios are a common challenge of learning agents at deployment, typically leading to arbitrary deductions and poorly-informed decisions. In principle, detection of and adaptation to OOD scenes can mitigate their adverse effects. In this paper, we highlight the limitations of current approaches to novel driving scenes and propose an epistemic uncertainty-aware planning method, called \emph{robust imitative planning} (RIP). Our method can detect and recover from some distribution shifts, reducing the overconfident and catastrophic extrapolations in OOD scenes. If the model's uncertainty is too great to suggest a safe course of action, the model can instead query the expert driver for feedback, enabling sample-efficient online adaptation, a variant of our method we term \emph{adaptive robust imitative planning} (AdaRIP). Our methods outperform current state-of-the-art approaches in the nuScenes \emph{prediction} challenge, but since no benchmark evaluating OOD detection and adaption currently exists to assess \emph{control}, we introduce an autonomous car novel-scene benchmark, \texttt{CARNOVEL}, to evaluate the robustness of driving agents to a suite of tasks with distribution shifts.