 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework
Paper and Code
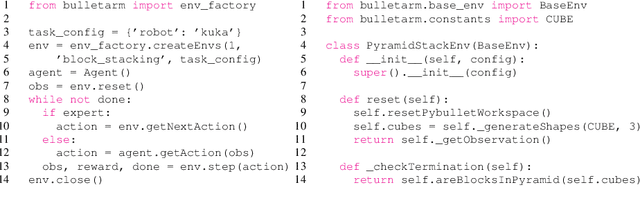

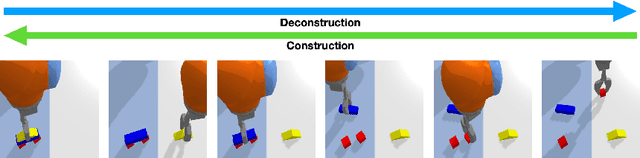

We present BulletArm, a novel benchmark and learning-environment for robotic manipulation. BulletArm is designed around two key principles: reproducibility and extensibility. We aim to encourage more direct comparisons between robotic learning methods by providing a set of standardized benchmark tasks in simulation alongside a collection of baseline algorithms. The framework consists of 31 different manipulation tasks of varying difficulty, ranging from simple reaching and picking tasks to more realistic tasks such as bin packing and pallet stacking. In addition to the provided tasks, BulletArm has been built to facilitate easy expansion and provides a suite of tools to assist users when adding new tasks to the framework. Moreover, we introduce a set of five benchmarks and evaluate them using a series of state-of-the-art baseline algorithms. By including these algorithms as part of our framework, we hope to encourage users to benchmark their work on any new tasks against these baselines.