 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrain-Inspired Modelling and Decision-making for Human-Like Autonomous Driving in Mixed Traffic Environment
Paper and Code
Jan 13, 2022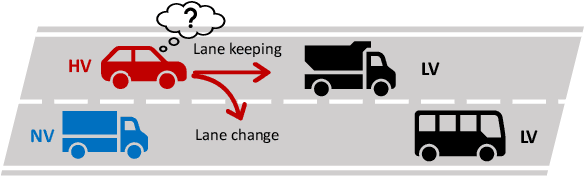

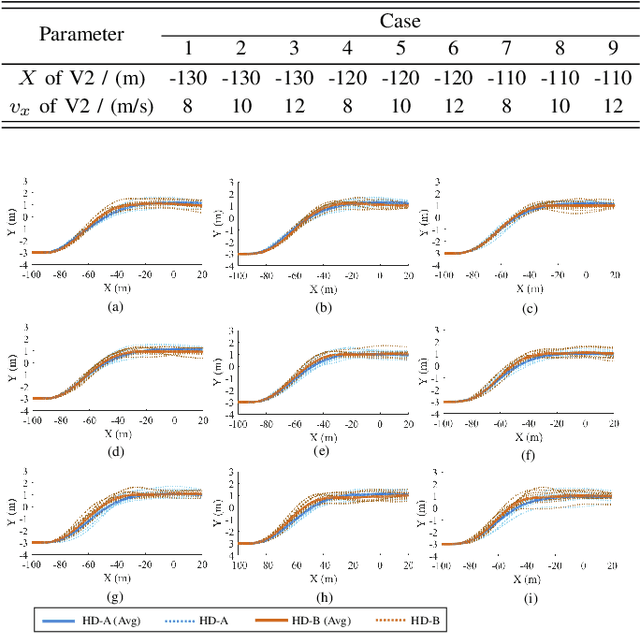
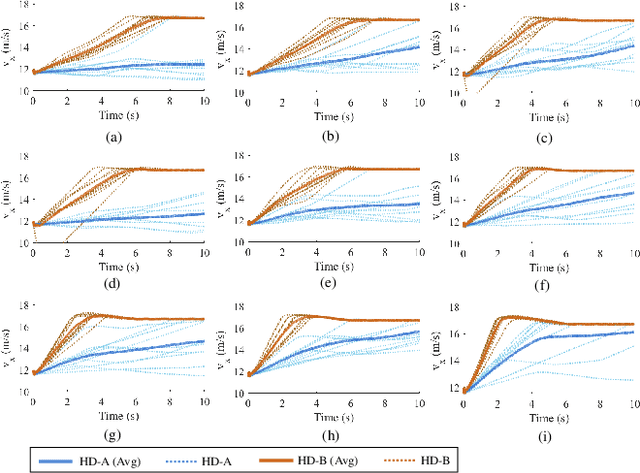
In this paper, a human-like driving framework is designed for autonomous vehicles (AVs), which aims to make AVs better integrate into the transportation ecology of human driving and eliminate the misunderstanding and incompatibility of human drivers to autonomous driving. Based on the analysis of the real world INTERACTION dataset, a driving aggressiveness estimation model is established with the fuzzy inference approach. Then, a human-like driving model, which integrates the brain emotional learning circuit model (BELCM) with the two-point preview model, is designed. In the human-like lane-change decision-making algorithm, the cost function is designed comprehensively considering driving safety and travel efficiency. Based on the cost function and multi-constraint, the dynamic game algorithm is applied to modelling the interaction and decision making between AV and human driver. Additionally, to guarantee the lane-change safety of AVs, an artificial potential field model is built for collision risk assessment. Finally, the proposed algorithm is evaluated through human-in-the-loop experiments on a driving simulator, and the results demonstrated the feasibility and effectiveness of the proposed method.