Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBond theory for pentapods and hexapods
Paper and Code
Aug 28, 2014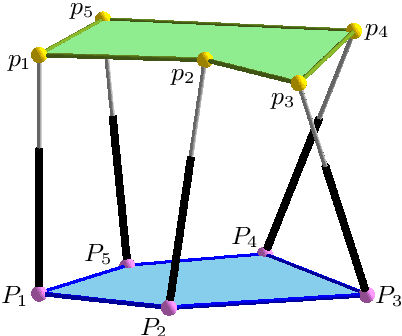
This paper deals with the old and classical problem of determining necessary conditions for the overconstrained mobility of some mechanical device. In particular, we show that the mobility of pentapods/hexapods implies either a collinearity condition on the anchor points, or a geometric condition on the normal projections of base and platform points. The method is based on a specific compactification of the group of direct isometries of $\mathbb{R}^3$.
* Journal of Geometry, July 2015, Volume 106, Issue 2, Pages 211-228 * 17 pages, 1 figure
View paper on