 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiologically inspired model simulating visual pathways and cerebellum function in human - Achieving visuomotor coordination and high precision movement with learning ability
Paper and Code
Mar 08, 2016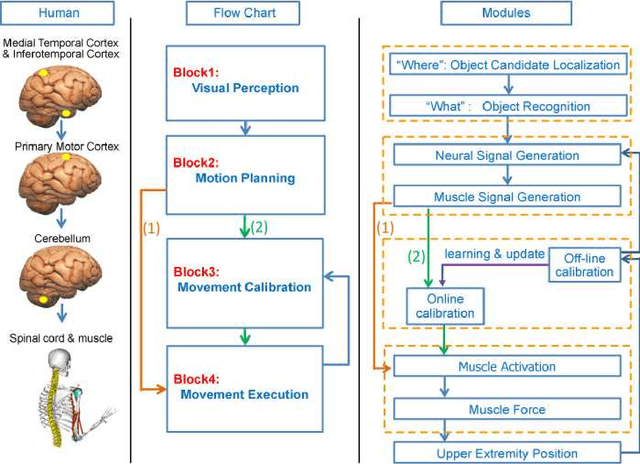
In recent years, the interdisciplinary research between information science and neuroscience has been a hotspot. In this paper, based on recent biological findings, we proposed a new model to mimic visual information processing, motor planning and control in central and peripheral nervous systems of human. Main steps of the model are as follows: 1) Simulating "where" pathway in human: the Selective Search method is applied to simulate the function of human dorsal visual pathway to localize object candidates; 2) Simulating "what" pathway in human: a Convolutional Deep Belief Network is applied to simulate the hierarchical structure and function of human ventral visual pathway for object recognition; 3) Simulating motor planning process in human: habitual motion planning process in human is simulated, and motor commands are generated from the combination of control signals from past experiences; 4) Simulating precise movement control in human: calibrated control signals, which mimic the adjustment for movement from cerebellum in human, are generated and updated from calibration of movement errors in past experiences, and sent to the movement model to achieve high precision. The proposed framework mimics structures and functions of human recognition, visuomotor coordination and precise motor control. Experiments on object localization, recognition and movement control demonstrate that the new proposed model can not only accomplish visuomotor coordination tasks, but also achieve high precision movement with learning ability. Meanwhile, the results also prove the validity of the introduced mechanisms. Furthermore, the proposed model could be generalized and applied to other systems, such as mechanical and electrical systems in robotics, to achieve fast response, high precision movement with learning ability.