 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioinspired Sensing of Undulatory Flow Fields Generated by Leg Kicks in Swimming
Paper and Code
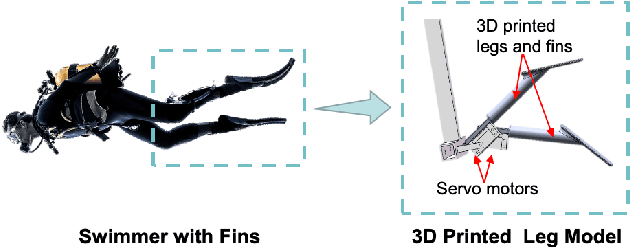
The artificial lateral line (ALL) is a bioinspired flow sensing system for underwater robots, comprising of distributed flow sensors. The ALL has been successfully applied to detect the undulatory flow fields generated by body undulation and tail-flapping of bioinspired robotic fish. However, its feasibility and performance in sensing the undulatory flow fields produced by human leg kicks during swimming has not been systematically tested and studied. This paper presents a novel sensing framework to investigate the undulatory flow field generated by swimmer's leg kicks, leveraging bioinspired ALL sensing. To evaluate the feasibility of using the ALL system for sensing the undulatory flow fields generated by swimmer leg kicks, this paper designs an experimental platform integrating an ALL system and a lab-fabricated human leg model. To enhance the accuracy of flow sensing, this paper proposes a feature extraction method that dynamically fuses time-domain and time-frequency characteristics. Specifically, time-domain features are extracted using one-dimensional convolutional neural networks and bidirectional long short-term memory networks (1DCNN-BiLSTM), while time-frequency features are extracted using short-term Fourier transform and two-dimensional convolutional neural networks (STFT-2DCNN). These features are then dynamically fused based on attention mechanisms to achieve accurate sensing of the undulatory flow field. Furthermore, extensive experiments are conducted to test various scenarios inspired by human swimming, such as leg kick pattern recognition and kicking leg localization, achieving satisfactory results.