 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBilateral Deep Reinforcement Learning Approach for Better-than-human Car Following Model
Paper and Code
Mar 03, 2022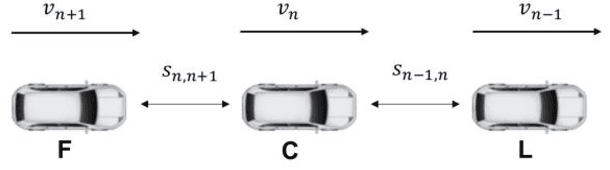
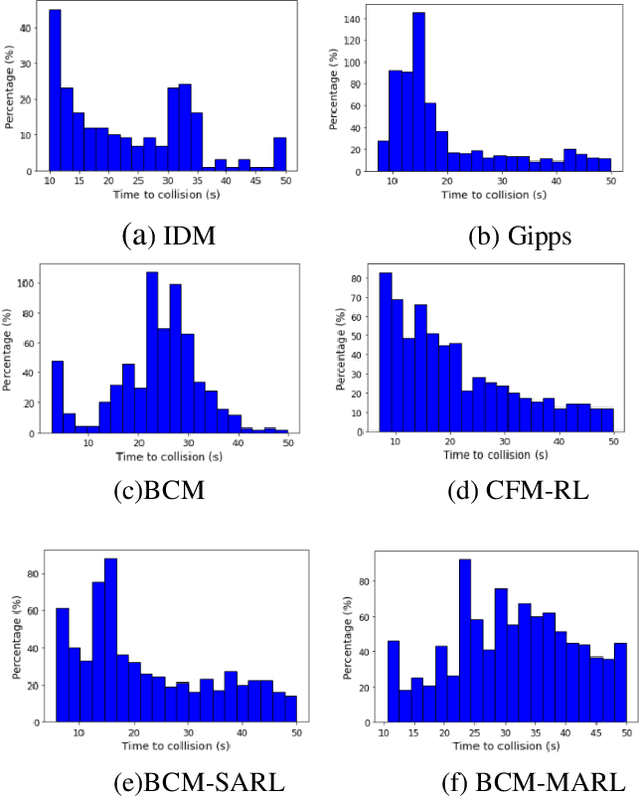
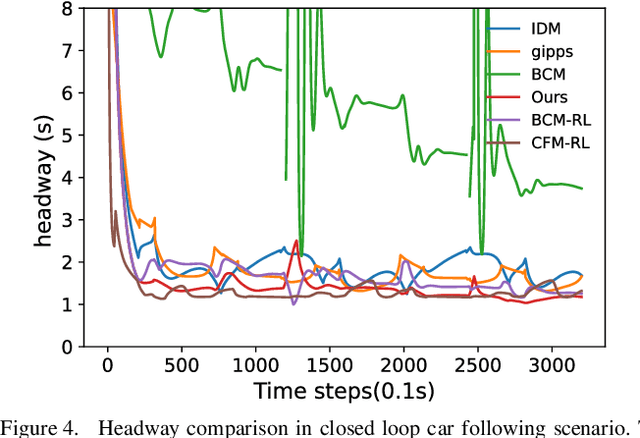
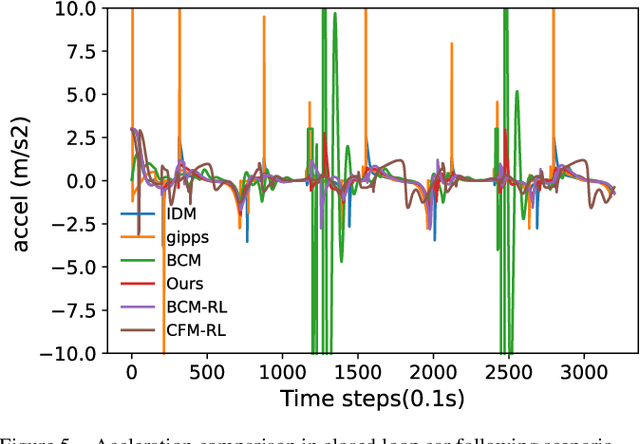
In the coming years and decades, autonomous vehicles (AVs) will become increasingly prevalent, offering new opportunities for safer and more convenient travel and potentially smarter traffic control methods exploiting automation and connectivity. Car following is a prime function in autonomous driving. Car following based on reinforcement learning has received attention in recent years with the goal of learning and achieving performance levels comparable to humans. However, most existing RL methods model car following as a unilateral problem, sensing only the vehicle ahead. Recent literature, however, Wang and Horn [16] has shown that bilateral car following that considers the vehicle ahead and the vehicle behind exhibits better system stability. In this paper we hypothesize that this bilateral car following can be learned using RL, while learning other goals such as efficiency maximisation, jerk minimization, and safety rewards leading to a learned model that outperforms human driving. We propose and introduce a Deep Reinforcement Learning (DRL) framework for car following control by integrating bilateral information into both state and reward function based on the bilateral control model (BCM) for car following control. Furthermore, we use a decentralized multi-agent reinforcement learning framework to generate the corresponding control action for each agent. Our simulation results demonstrate that our learned policy is better than the human driving policy in terms of (a) inter-vehicle headways, (b) average speed, (c) jerk, (d) Time to Collision (TTC) and (e) string stability.