Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBidirectional Interaction between Visual and Motor Generative Models using Predictive Coding and Active Inference
Paper and Code
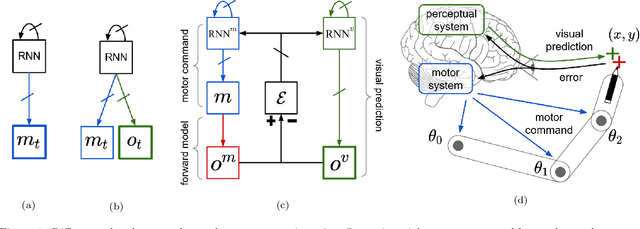
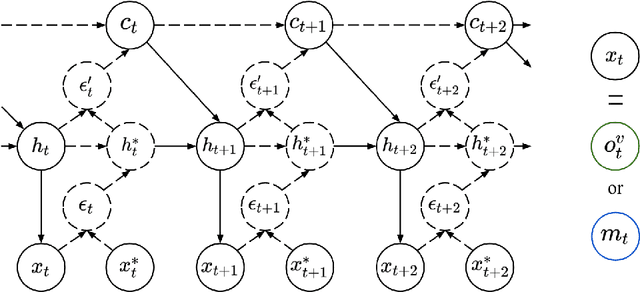
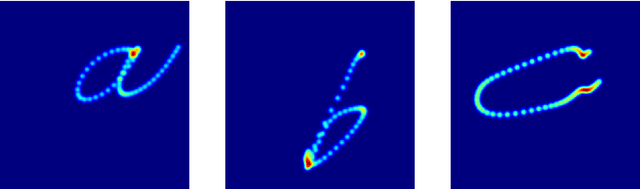
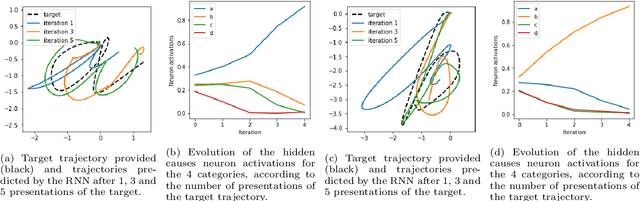
In this work, we build upon the Active Inference (AIF) and Predictive Coding (PC) frameworks to propose a neural architecture comprising a generative model for sensory prediction, and a distinct generative model for motor trajectories. We highlight how sequences of sensory predictions can act as rails guiding learning, control and online adaptation of motor trajectories. We furthermore inquire the effects of bidirectional interactions between the motor and the visual modules. The architecture is tested on the control of a simulated robotic arm learning to reproduce handwritten letters.
View paper on