 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Night Visibility: Adaptive Multi-Scale Fusion of Infrared and Visible Images
Paper and Code
Mar 02, 2024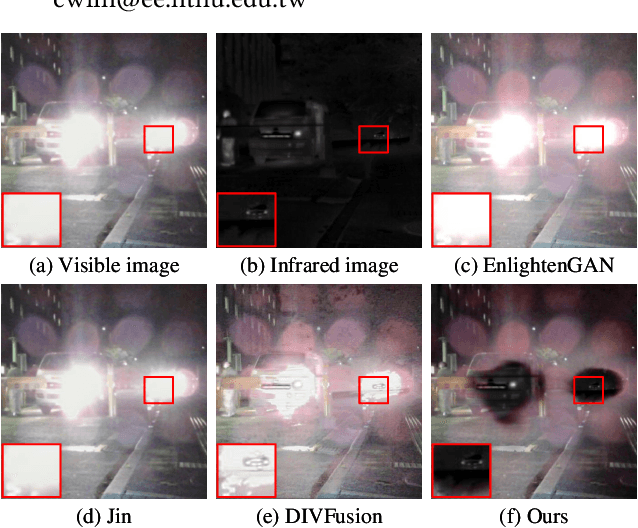
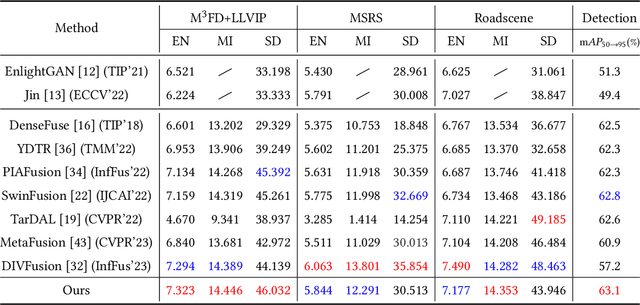
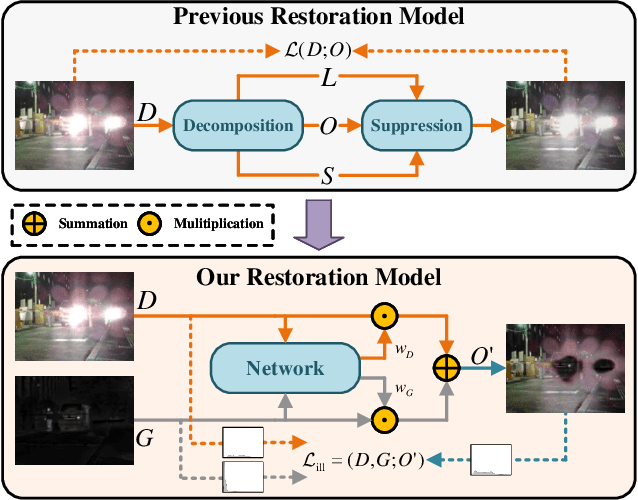
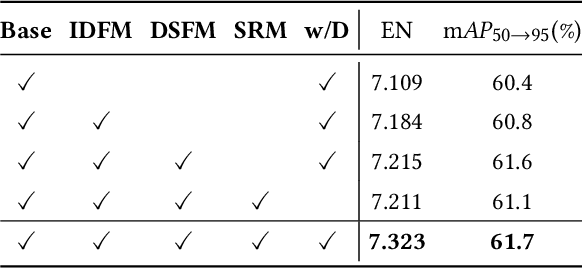
In addition to low light, night images suffer degradation from light effects (e.g., glare, floodlight, etc). However, existing nighttime visibility enhancement methods generally focus on low-light regions, which neglects, or even amplifies the light effects. To address this issue, we propose an Adaptive Multi-scale Fusion network (AMFusion) with infrared and visible images, which designs fusion rules according to different illumination regions. First, we separately fuse spatial and semantic features from infrared and visible images, where the former are used for the adjustment of light distribution and the latter are used for the improvement of detection accuracy. Thereby, we obtain an image free of low light and light effects, which improves the performance of nighttime object detection. Second, we utilize detection features extracted by a pre-trained backbone that guide the fusion of semantic features. Hereby, we design a Detection-guided Semantic Fusion Module (DSFM) to bridge the domain gap between detection and semantic features. Third, we propose a new illumination loss to constrain fusion image with normal light intensity. Experimental results demonstrate the superiority of AMFusion with better visual quality and detection accuracy. The source code will be released after the peer review process.