 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBetaZero: Belief-State Planning for Long-Horizon POMDPs using Learned Approximations
Paper and Code
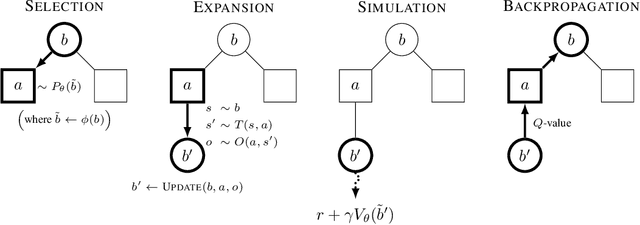
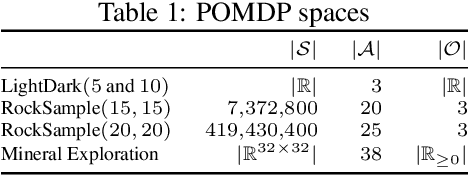
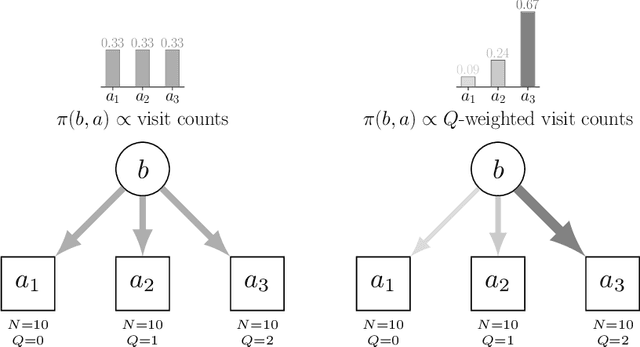
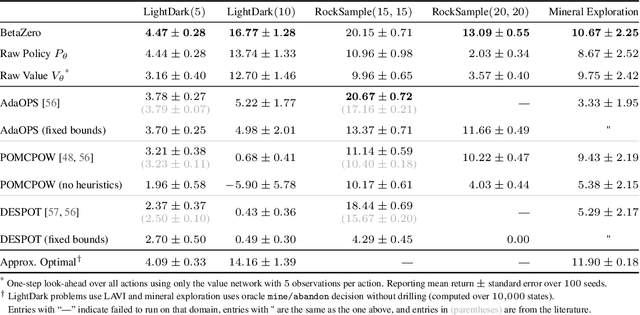
Real-world planning problems$\unicode{x2014}$including autonomous driving and sustainable energy applications like carbon storage and resource exploration$\unicode{x2014}$have recently been modeled as partially observable Markov decision processes (POMDPs) and solved using approximate methods. To solve high-dimensional POMDPs in practice, state-of-the-art methods use online planning with problem-specific heuristics to reduce planning horizons and make the problems tractable. Algorithms that learn approximations to replace heuristics have recently found success in large-scale problems in the fully observable domain. The key insight is the combination of online Monte Carlo tree search with offline neural network approximations of the optimal policy and value function. In this work, we bring this insight to partially observed domains and propose BetaZero, a belief-state planning algorithm for POMDPs. BetaZero learns offline approximations based on accurate belief models to enable online decision making in long-horizon problems. We address several challenges inherent in large-scale partially observable domains; namely challenges of transitioning in stochastic environments, prioritizing action branching with limited search budget, and representing beliefs as input to the network. We apply BetaZero to various well-established benchmark POMDPs found in the literature. As a real-world case study, we test BetaZero on the high-dimensional geological problem of critical mineral exploration. Experiments show that BetaZero outperforms state-of-the-art POMDP solvers on a variety of tasks.