 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Reinforcement Learning Techniques for Autonomous Navigation
Paper and Code
Oct 10, 2022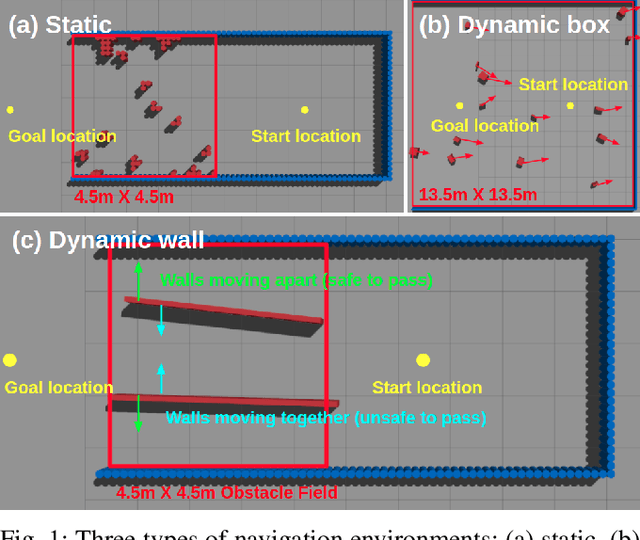
Deep reinforcement learning (RL) has brought many successes for autonomous robot navigation. However, there still exists important limitations that prevent real-world use of RL-based navigation systems. For example, most learning approaches lack safety guarantees; and learned navigation systems may not generalize well to unseen environments. Despite a variety of recent learning techniques to tackle these challenges in general, a lack of an open-source benchmark and reproducible learning methods specifically for autonomous navigation makes it difficult for roboticists to choose what learning methods to use for their mobile robots and for learning researchers to identify current shortcomings of general learning methods for autonomous navigation. In this paper, we identify four major desiderata of applying deep RL approaches for autonomous navigation: (D1) reasoning under uncertainty, (D2) safety, (D3) learning from limited trial-and-error data, and (D4) generalization to diverse and novel environments. Then, we explore four major classes of learning techniques with the purpose of achieving one or more of the four desiderata: memory-based neural network architectures (D1), safe RL (D2), model-based RL (D2, D3), and domain randomization (D4). By deploying these learning techniques in a new open-source large-scale navigation benchmark and real-world environments, we perform a comprehensive study aimed at establishing to what extent can these techniques achieve these desiderata for RL-based navigation systems.