 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Individual Tree Mapping with Sub-meter Imagery
Paper and Code
Nov 14, 2023

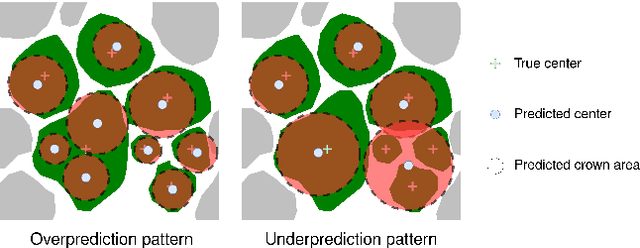

There is a rising interest in mapping trees using satellite or aerial imagery, but there is no standardized evaluation protocol for comparing and enhancing methods. In dense canopy areas, the high variability of tree sizes and their spatial proximity makes it arduous to define the quality of the predictions. Concurrently, object-centric approaches such as bounding box detection usuallyperform poorly on small and dense objects. It thus remains unclear what is the ideal framework for individual tree mapping, in regards to detection and segmentation approaches, convolutional neural networks and transformers. In this paper, we introduce an evaluation framework suited for individual tree mapping in any physical environment, with annotation costs and applicative goals in mind. We review and compare different approaches and deep architectures, and introduce a new method that we experimentally prove to be a good compromise between segmentation and detection.