 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Relational Memory for Semantic Visual Navigation
Paper and Code
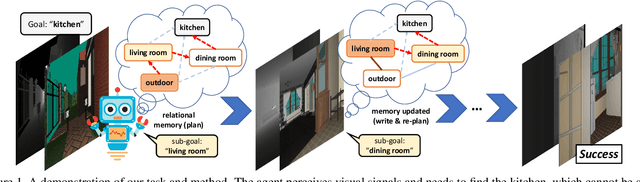
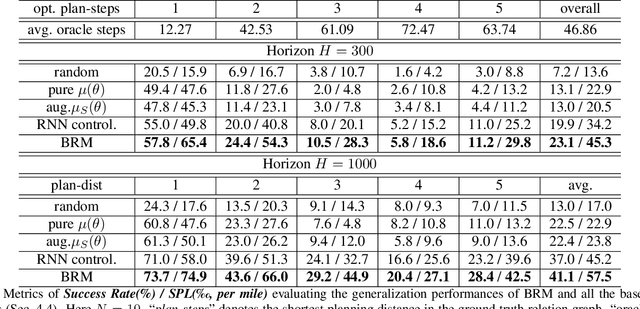
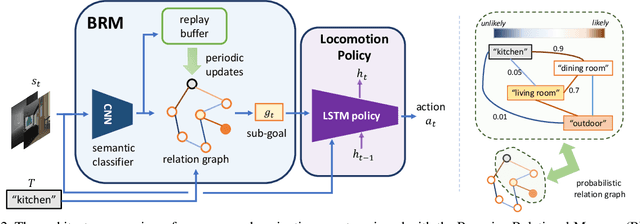

We introduce a new memory architecture, Bayesian Relational Memory (BRM), to improve the generalization ability for semantic visual navigation agents in unseen environments, where an agent is given a semantic target to navigate towards. BRM takes the form of a probabilistic relation graph over semantic entities (e.g., room types), which allows (1) capturing the layout prior from training environments, i.e., prior knowledge, (2) estimating posterior layout at test time, i.e., memory update, and (3) efficient planning for navigation, altogether. We develop a BRM agent consisting of a BRM module for producing sub-goals and a goal-conditioned locomotion module for control. When testing in unseen environments, the BRM agent outperforms baselines that do not explicitly utilize the probabilistic relational memory structure