 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Quadrature for Probability Threshold Robustness of Partially Undefined Functions
Paper and Code
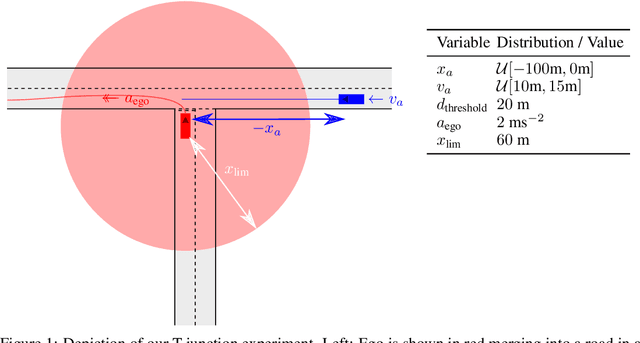
In engineering design, one often wishes to calculate the probability that the performance of a system is satisfactory under uncertainty. State of the art algorithms exist to solve this problem using active learning with Gaussian process models. However, these algorithms cannot be applied to problems which often occur in the autonomous vehicle domain where the performance of a system may be undefined under certain circumstances. Na\"ive modification of existing algorithms by simply masking undefined values will introduce a discontinuous system performance function, and would be unsuccessful because these algorithms are known to fail for discontinuous performance functions. We solve this problem using a hierarchical model for the system performance, where undefined performance is classified before the performance is regressed. This enables active learning Gaussian process methods to be applied to problems where the performance of the system is sometimes undefined, and we demonstrate this by testing our methodology on synthetic numerical examples for the autonomous driving domain.