 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian Deep Basis Fitting for Depth Completion with Uncertainty
Paper and Code
Mar 29, 2021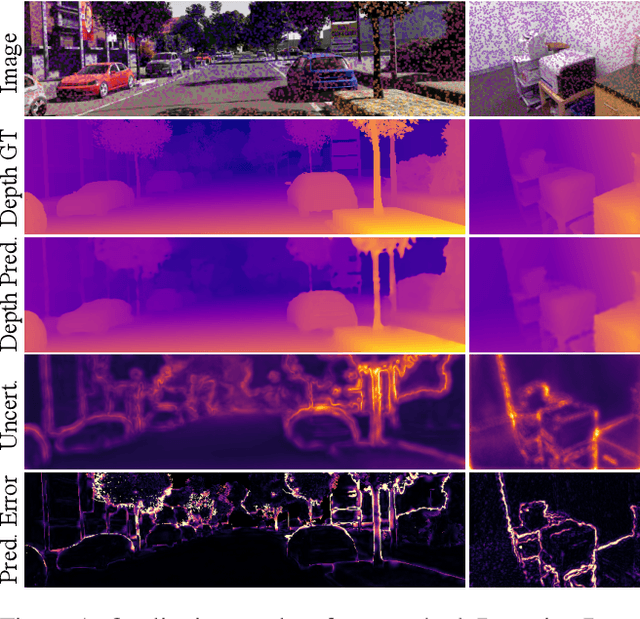

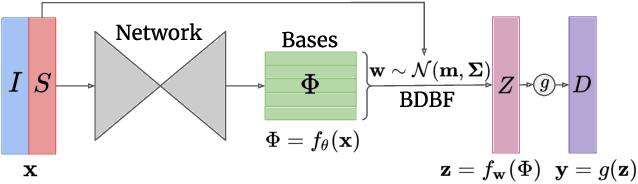

In this work we investigate the problem of uncertainty estimation for image-guided depth completion. We extend Deep Basis Fitting (DBF) for depth completion within a Bayesian evidence framework to provide calibrated per-pixel variance. The DBF approach frames the depth completion problem in terms of a network that produces a set of low-dimensional depth bases and a differentiable least squares fitting module that computes the basis weights using the sparse depths. By adopting a Bayesian treatment, our Bayesian Deep Basis Fitting (BDBF) approach is able to 1) predict high-quality uncertainty estimates and 2) enable depth completion with few or no sparse measurements. We conduct controlled experiments to compare BDBF against commonly used techniques for uncertainty estimation under various scenarios. Results show that our method produces better uncertainty estimates with accurate depth prediction.