 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBarrier Certified Safety Learning Control: When Sum-of-Square Programming Meets Reinforcement Learning
Paper and Code
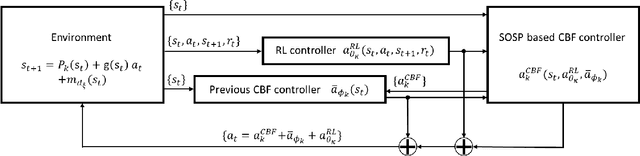
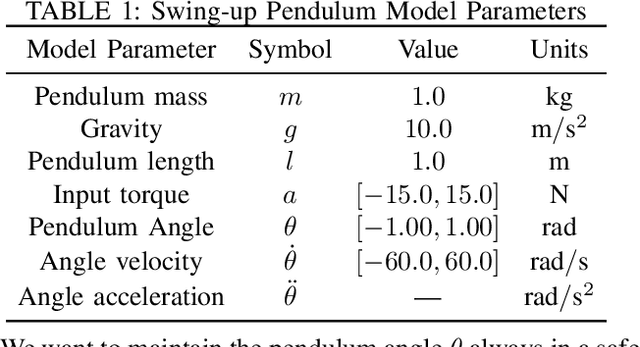
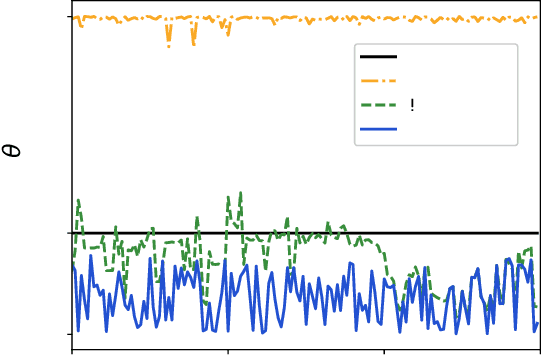

Safety guarantee is essential in many engineering implementations. Reinforcement learning provides a useful way to strengthen safety. However, reinforcement learning algorithms cannot completely guarantee safety over realistic operations. To address this issue, this work adopts control barrier functions over reinforcement learning, and proposes a compensated algorithm to completely maintain safety. Specifically, a sum-of-squares programming has been exploited to search for the optimal controller, and tune the learning hyperparameters simultaneously. Thus, the control actions are pledged to be always within the safe region. The effectiveness of proposed method is demonstrated via an inverted pendulum model. Compared to quadratic programming based reinforcement learning methods, our sum-of-squares programming based reinforcement learning has shown its superiority.