 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Domain Gap for Object Instance Detection
Paper and Code
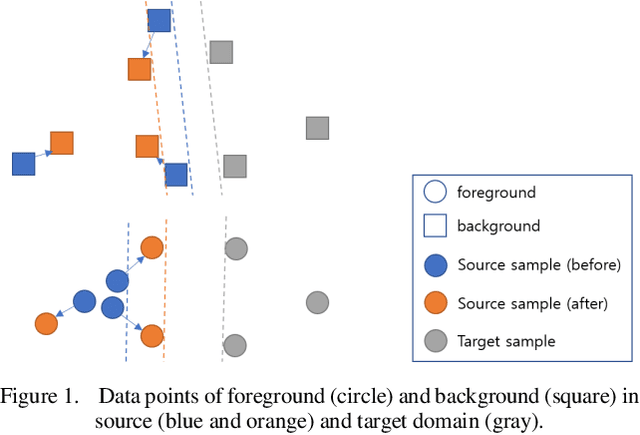
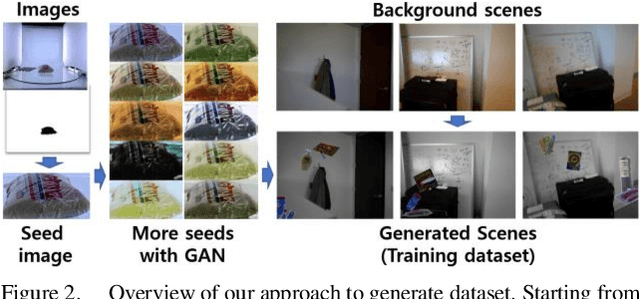

Object instance detection in cluttered indoor environment is a core functionality for service robots. We can readily build a detection system by following recent successful strategy of deep convolutional neural networks, if we have a large annotated dataset. However, it is hard to prepare such a huge dataset in instance detection problem where only small number of samples are available. This is one of main impediment to deploying an object detection system. To overcome this obstacle, many approaches to generate synthetic dataset have been proposed. These approaches confront the domain gap or reality gap problem stems from discrepancy between source domain (synthetic training dataset) and target domain (real test dataset). In this paper, we propose a simple approach to generate a synthetic dataset with minimum human effort. Especially, we identify that domain gaps of foreground and background are unbalanced and propose methods to balance these gaps. In the experiment, we verify that our methods help domain gaps to balance and improve the accuracy of object instance detection in cluttered indoor environment.