 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBADGR: An Autonomous Self-Supervised Learning-Based Navigation System
Paper and Code
Feb 13, 2020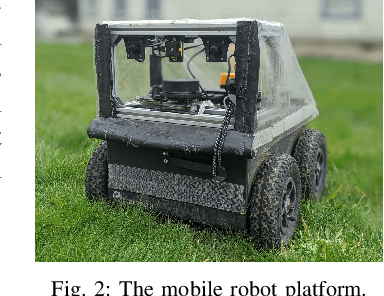

Mobile robot navigation is typically regarded as a geometric problem, in which the robot's objective is to perceive the geometry of the environment in order to plan collision-free paths towards a desired goal. However, a purely geometric view of the world can can be insufficient for many navigation problems. For example, a robot navigating based on geometry may avoid a field of tall grass because it believes it is untraversable, and will therefore fail to reach its desired goal. In this work, we investigate how to move beyond these purely geometric-based approaches using a method that learns about physical navigational affordances from experience. Our approach, which we call BADGR, is an end-to-end learning-based mobile robot navigation system that can be trained with self-supervised off-policy data gathered in real-world environments, without any simulation or human supervision. BADGR can navigate in real-world urban and off-road environments with geometrically distracting obstacles. It can also incorporate terrain preferences, generalize to novel environments, and continue to improve autonomously by gathering more data. Videos, code, and other supplemental material are available on our website https://sites.google.com/view/badgr