Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBaconian: A Unified Opensource Framework for Model-Based Reinforcement Learning
Paper and Code
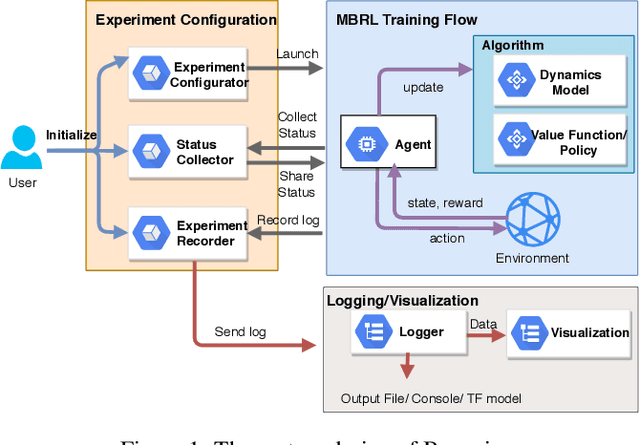
Model-Based Reinforcement Learning (MBRL) is one category of Reinforcement Learning (RL) methods which can improve sampling efficiency by modeling and approximating system dynamics. It has been widely adopted in the research of robotics, autonomous driving, etc. Despite its popularity, there still lacks some sophisticated and reusable opensource frameworks to facilitate MBRL research and experiments. To fill this gap, we develop a flexible and modularized framework, Baconian, which allows researchers to easily implement a MBRL testbed by customizing or building upon our provided modules and algorithms. Our framework can free the users from re-implementing popular MBRL algorithms from scratch thus greatly saves the users' efforts.
View paper on