 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoPlace: Robust Place Recognition with Low-cost Single-chip Automotive Radar
Paper and Code
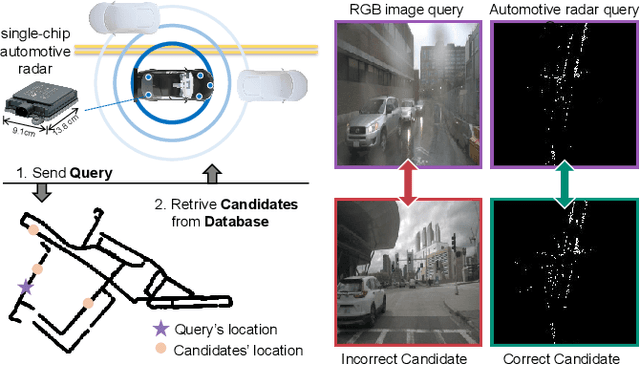
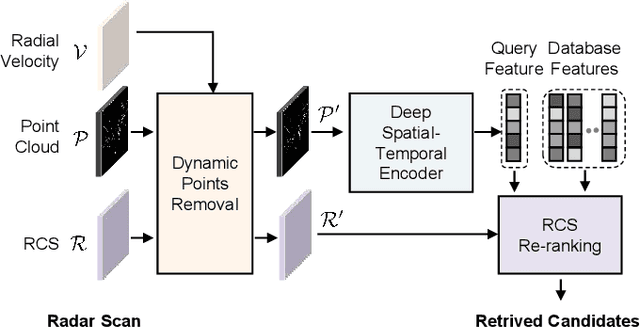
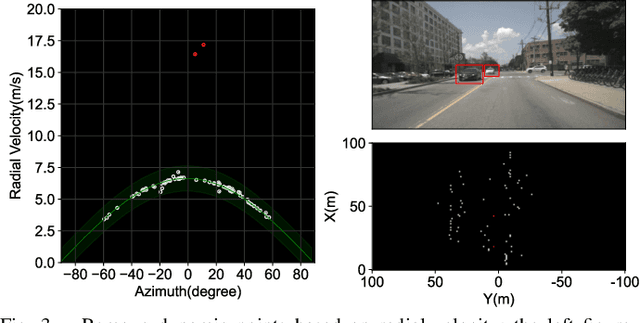
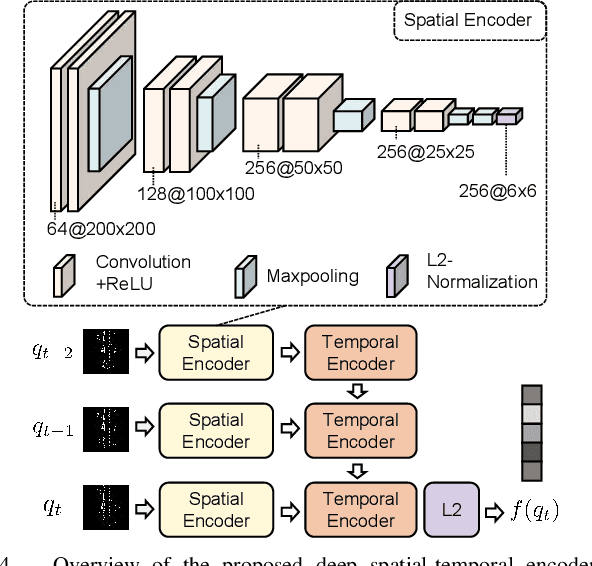
This paper presents a novel place recognition approach to autonomous vehicles by using low-cost, single-chip automotive radar. Aimed at improving recognition robustness and fully exploiting the rich information provided by this emerging automotive radar, our approach follows a principled pipeline that comprises (1) dynamic points removal from instant Doppler measurement, (2) spatial-temporal feature embedding on radar point clouds, and (3) retrieved candidates refinement from Radar Cross Section measurement. Extensive experimental results on the public nuScenes dataset demonstrate that existing visual/LiDAR/spinning radar place recognition approaches are less suitable for single-chip automotive radar. In contrast, our purpose-built approach for automotive radar consistently outperforms a variety of baseline methods via a comprehensive set of metrics, providing insights into the efficacy when used in a realistic system.