 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Underwater Vehicle-Manipulator Systems Path Planning with RRTAUVMS Algorithm
Paper and Code
Sep 11, 2021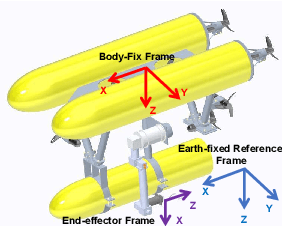
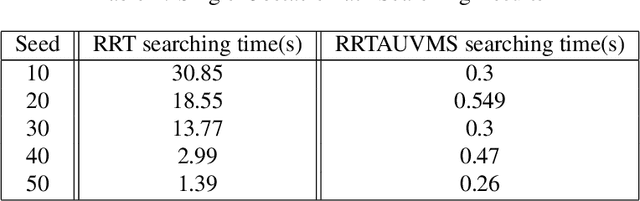
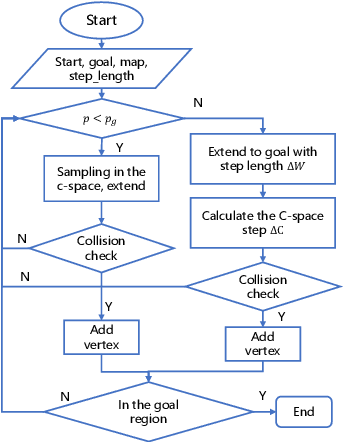
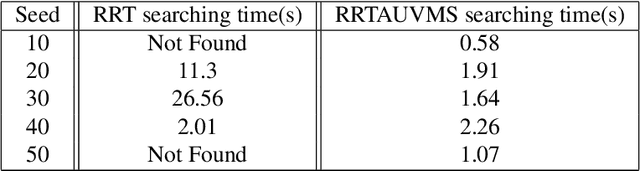
Autonomous Underwater Vehicle-Manipulator systems (AUVMS) is a new tool for ocean exploration, the AUVMS path planning problem is addressed in this paper. AUVMS is a high dimension system with a large difference in inertia distribution, also it works in a complex environment with obstacles. By integrating the rapidly-exploring random tree(RRT) algorithm with the AUVMS kinematics model, the proposed RRTAUVMS algorithm could randomly sample in the configuration space(C-Space), and also grow the tree directly towards the workspace goal in the task space. The RRTAUVMS can also deal with the redundant mapping of workspace planning goal and configuration space goal. Compared with the traditional RRT algorithm, the efficiency of the AUVMS path planning can be significantly improved.