Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous learning and chaining of motor primitives using the Free Energy Principle
Paper and Code
May 11, 2020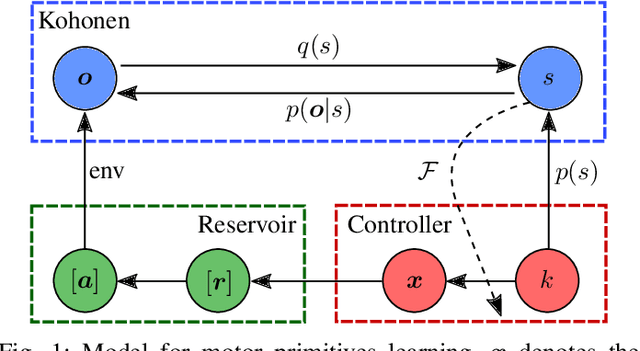
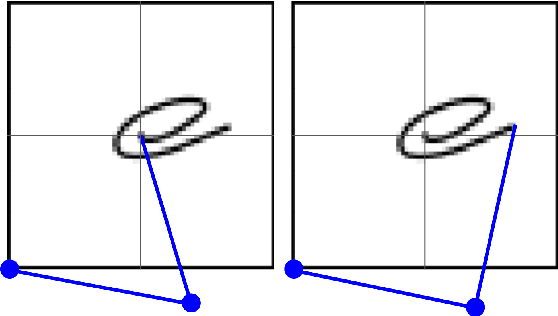
In this article, we apply the Free-Energy Principle to the question of motor primitives learning. An echo-state network is used to generate motor trajectories. We combine this network with a perception module and a controller that can influence its dynamics. This new compound network permits the autonomous learning of a repertoire of motor trajectories. To evaluate the repertoires built with our method, we exploit them in a handwriting task where primitives are chained to produce long-range sequences.
View paper on