Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomaton-Guided Control Synthesis for Signal Temporal Logic Specifications
Paper and Code
Jul 17, 2022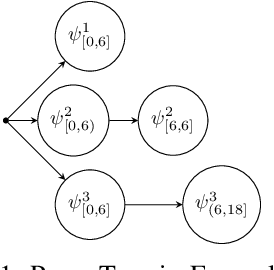
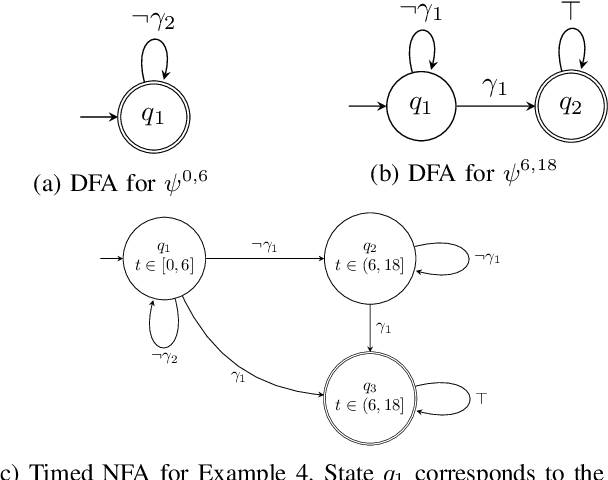
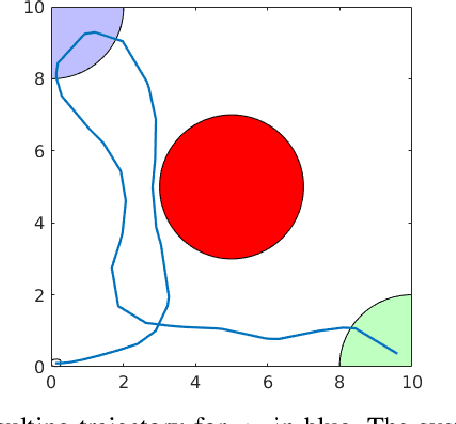
This paper presents an algorithmic framework for control synthesis of continuous dynamical systems subject to signal temporal logic (STL) specifications. We propose a novel algorithm to obtain a time-partitioned finite automaton from an STL specification, and introduce a multi-layered framework that utilizes this automaton to guide a sampling-based search tree both spatially and temporally. Our approach is able to synthesize a controller for nonlinear dynamics and polynomial predicate functions. We prove the correctness and probabilistic completeness of our algorithm, and illustrate the efficiency and efficacy of our framework on several case studies. Our results show an order of magnitude speedup over the state of the art.
* 9 pages, 3 figures, Accepted to CDC 2022
View paper on