 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttDLNet: Attention-based DL Network for 3D LiDAR Place Recognition
Paper and Code
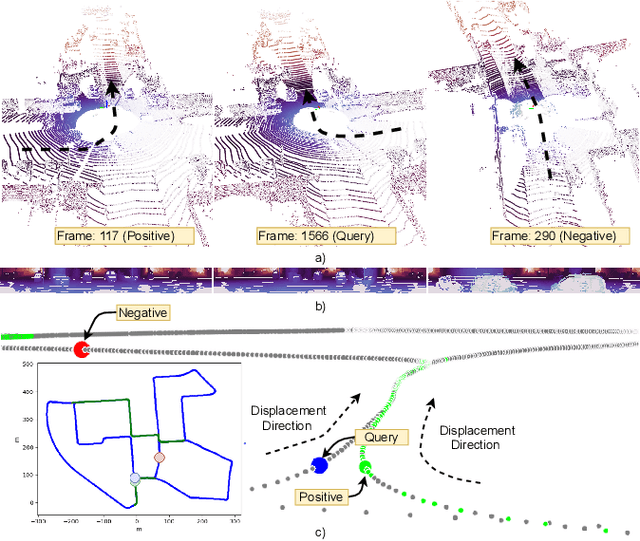
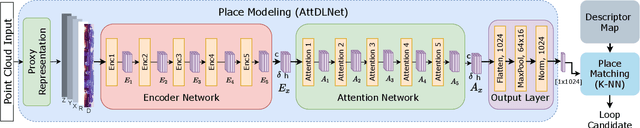
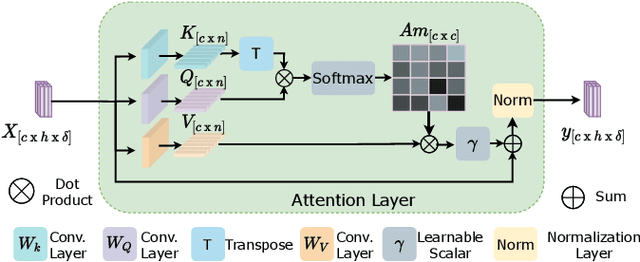

Deep networks have been progressively adapted to new sensor modalities, namely to 3D LiDAR, which led to unprecedented achievements in autonomous vehicle-related applications such as place recognition. One of the main challenges of deep models in place recognition is to extract efficient and descriptive feature representations that relate places based on their similarity. To address the problem of place recognition using LiDAR data, this paper proposes a novel 3D LiDAR-based deep learning network (named AttDLNet) that comprises an encoder network and exploits an attention mechanism to selectively focus on long-range context and interfeature relationships. The proposed network is trained and validated on the KITTI dataset, using the cosine loss for training and a retrieval-based place recognition pipeline for validation. Additionally, an ablation study is presented to assess the best network configuration. Results show that the encoder network features are already very descriptive, but adding attention to the network further improves performance. From the ablation study, results indicate that the middle encoder layers have the highest mean performance, while deeper layers are more robust to orientation change. The code is publicly available on the project website: https://github.com/Cybonic/ AttDLNet