 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAsynchronous Multi Agent Active Search
Paper and Code
Jun 25, 2020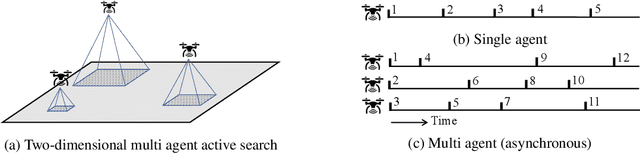
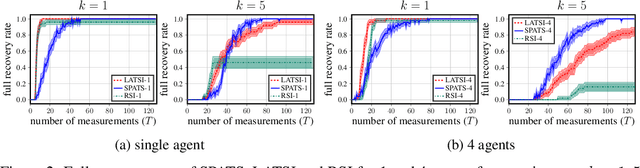
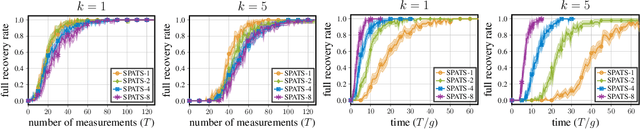
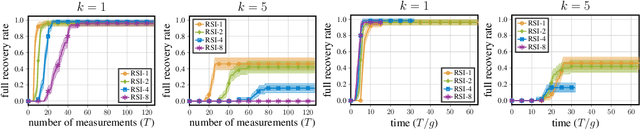
Active search refers to the problem of efficiently locating targets in an unknown environment by actively making data-collection decisions, and has many applications including detecting gas leaks, radiation sources or human survivors of disasters using aerial and/or ground robots (agents). Existing active search methods are in general only amenable to a single agent, or if they extend to multi agent they require a central control system to coordinate the actions of all agents. However, such control systems are often impractical in robotics applications. In this paper, we propose two distinct active search algorithms called SPATS (Sparse Parallel Asynchronous Thompson Sampling) and LATSI (LAplace Thompson Sampling with Information gain) that allow for multiple agents to independently make data-collection decisions without a central coordinator. Throughout we consider that targets are sparsely located around the environment in keeping with compressive sensing assumptions and its applicability in real world scenarios. Additionally, while most common search algorithms assume that agents can sense the entire environment (e.g. compressive sensing) or sense point-wise (e.g. Bayesian Optimization) at all times, we make a realistic assumption that each agent can only sense a contiguous region of space at a time. We provide simulation results as well as theoretical analysis to demonstrate the efficacy of our proposed algorithms.