 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssessing Modeling Variability in Autonomous Vehicle Accelerated Evaluation
Paper and Code
Apr 19, 2019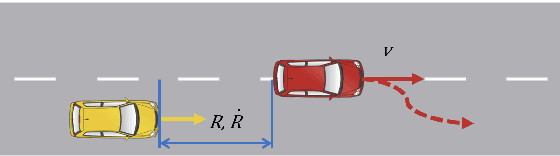
Safety evaluation of autonomous vehicles is extensively studied recently, one line of studies considers Monte Carlo based evaluation. The Monte Carlo based evaluation usually estimates the probability of safety-critical events as a safety measurement based on Monte Carlo samples. These Monte Carlo samples are generated from a stochastic model that is constructed based on real-world data. In this paper, we propose an approach to assess the potential estimation error in the evaluation procedure caused by data variability. The proposed method merges the classical bootstrap method for estimating input uncertainty with a likelihood ratio based scheme to reuse experiment results. The proposed approach is highly economical and efficient in terms of implementation costs in assessing input uncertainty for autonomous vehicle evaluation.