 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeARDIE: AR, Dialogue, and Eye Gaze Policies for Human-Robot Collaboration
Paper and Code
May 08, 2023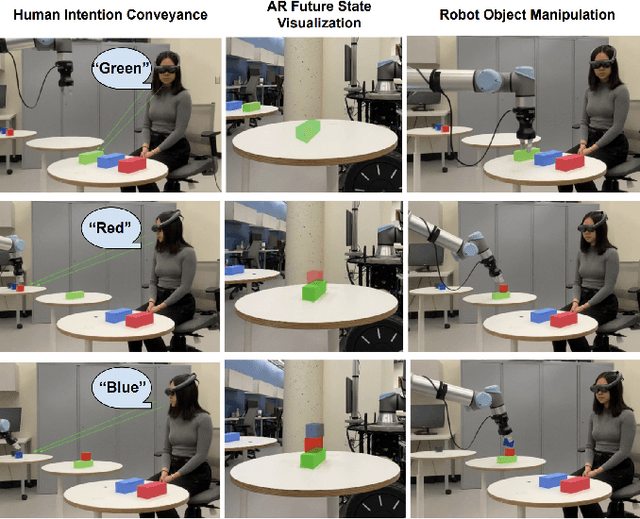

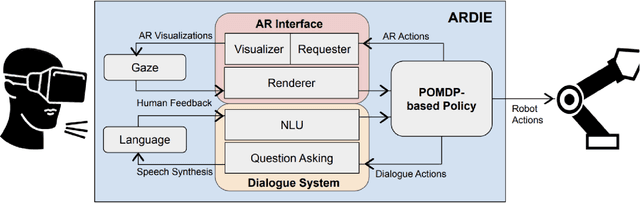
Human-robot collaboration (HRC) has become increasingly relevant in industrial, household, and commercial settings. However, the effectiveness of such collaborations is highly dependent on the human and robots' situational awareness of the environment. Improving this awareness includes not only aligning perceptions in a shared workspace, but also bidirectionally communicating intent and visualizing different states of the environment to enhance scene understanding. In this paper, we propose ARDIE (Augmented Reality with Dialogue and Eye Gaze), a novel intelligent agent that leverages multi-modal feedback cues to enhance HRC. Our system utilizes a decision theoretic framework to formulate a joint policy that incorporates interactive augmented reality (AR), natural language, and eye gaze to portray current and future states of the environment. Through object-specific AR renders, the human can visualize future object interactions to make adjustments as needed, ultimately providing an interactive and efficient collaboration between humans and robots.