Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproximate Robust NMPC using Reinforcement Learning
Paper and Code
Apr 06, 2021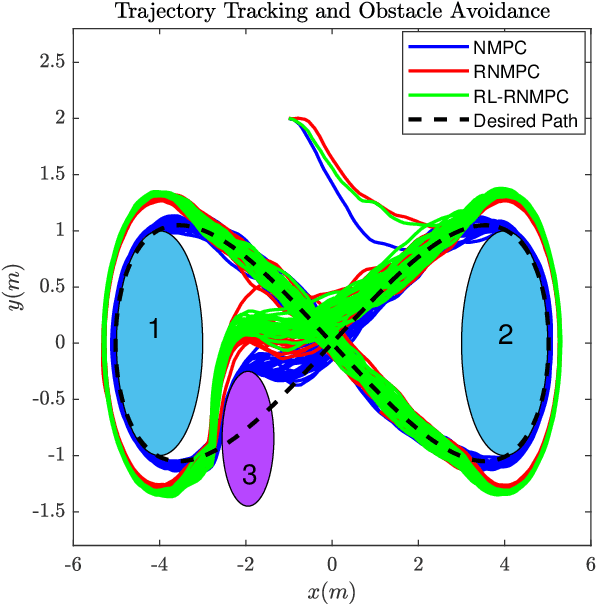
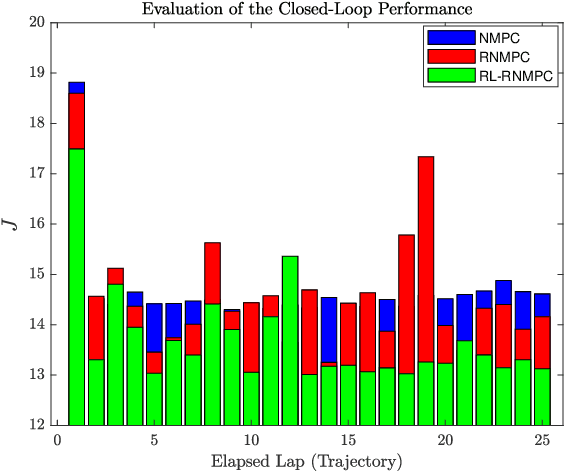
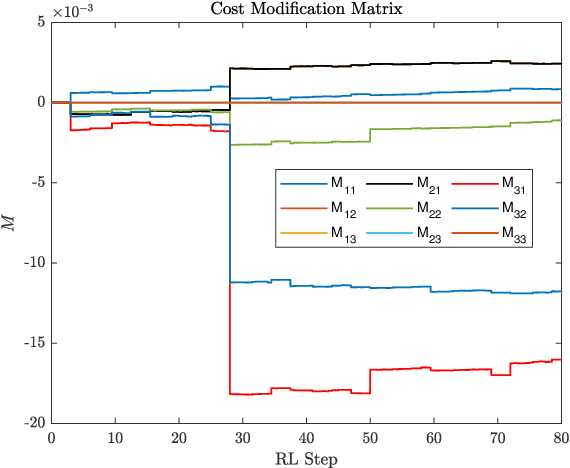
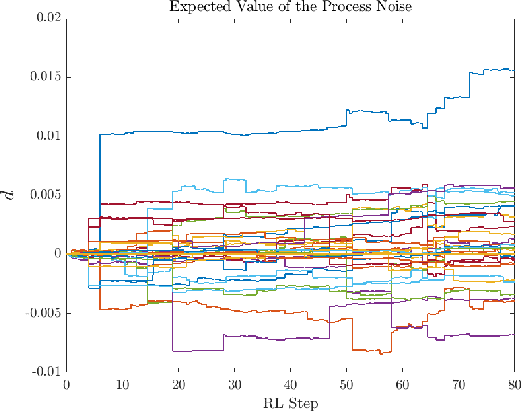
We present a Reinforcement Learning-based Robust Nonlinear Model Predictive Control (RL-RNMPC) framework for controlling nonlinear systems in the presence of disturbances and uncertainties. An approximate Robust Nonlinear Model Predictive Control (RNMPC) of low computational complexity is used in which the state trajectory uncertainty is modelled via ellipsoids. Reinforcement Learning is then used in order to handle the ellipsoidal approximation and improve the closed-loop performance of the scheme by adjusting the MPC parameters generating the ellipsoids. The approach is tested on a simulated Wheeled Mobile Robot (WMR) tracking a desired trajectory while avoiding static obstacles.
* This paper has been accepted to 2021 European Control Conference
(ECC)
View paper on