Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApproaches and Challenges in Robotic Perception for Table-top Rearrangement and Planning
Paper and Code
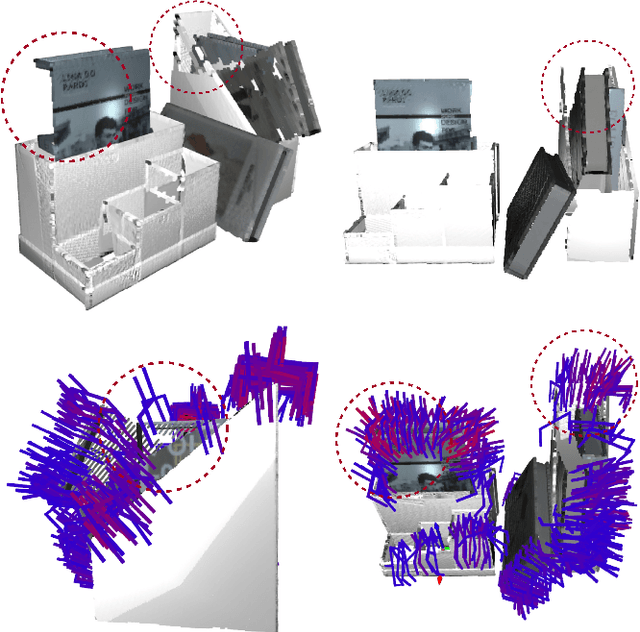

Table-top Rearrangement and Planning is a challenging problem that relies heavily on an excellent perception stack. The perception stack involves observing and registering the 3D scene on the table, detecting what objects are on the table, and how to manipulate them. Consequently, it greatly influences the system's task-planning and motion-planning stacks that follow. We present a comprehensive overview and discuss the different challenges associated with the perception module. This work is a result of our extensive involvement in the ICRA 2022 Open Cloud Robot Table Organization Challenge, in which we currently stand first on the leaderboard (as of 24th of April 2022, the final week of the challenge).
* 5 pages including references, 3 figures
View paper on