 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAppearance-Invariant 6-DoF Visual Localization using Generative Adversarial Networks
Paper and Code
Dec 24, 2020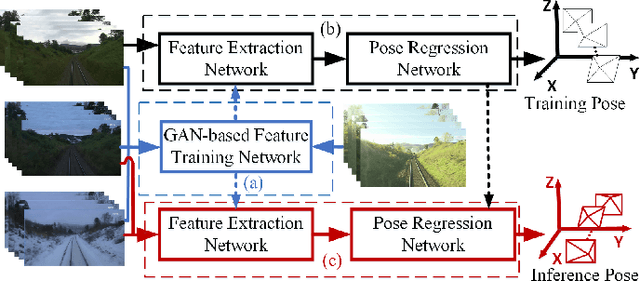
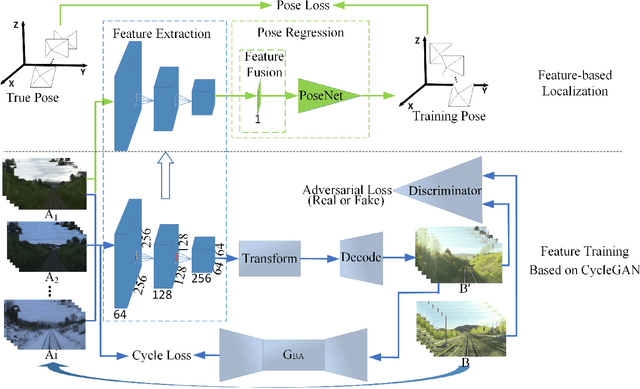
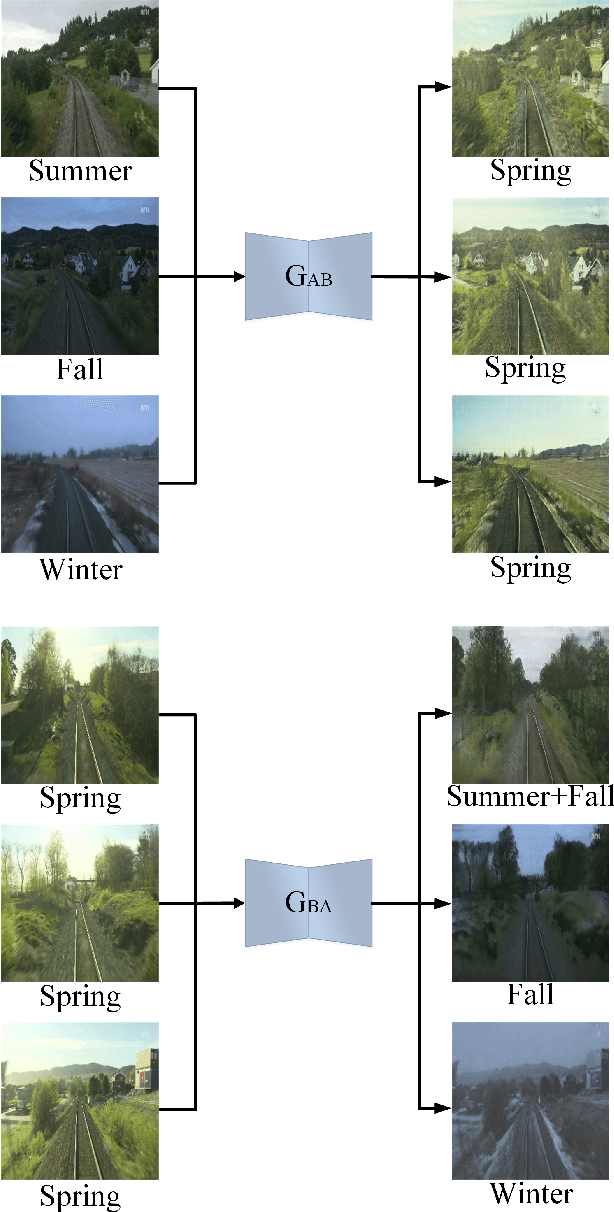
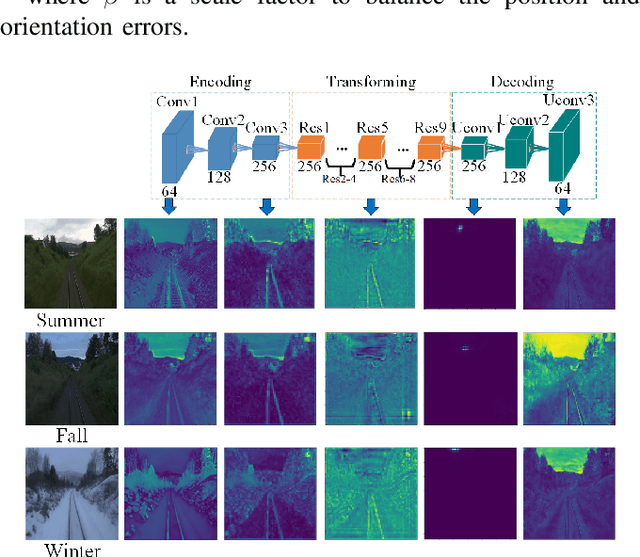
We propose a novel visual localization network when outside environment has changed such as different illumination, weather and season. The visual localization network is composed of a feature extraction network and pose regression network. The feature extraction network is made up of an encoder network based on the Generative Adversarial Network CycleGAN, which can capture intrinsic appearance-invariant feature maps from unpaired samples of different weathers and seasons. With such an invariant feature, we use a 6-DoF pose regression network to tackle long-term visual localization in the presence of outdoor illumination, weather and season changes. A variety of challenging datasets for place recognition and localization are used to prove our visual localization network, and the results show that our method outperforms state-of-the-art methods in the scenarios with various environment changes.