Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAntipodal Robotic Grasping using Generative Residual Convolutional Neural Network
Paper and Code
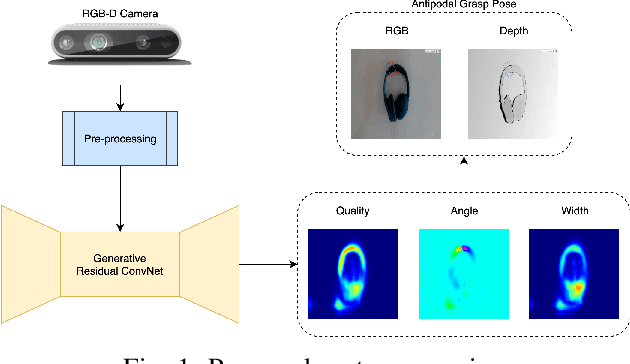
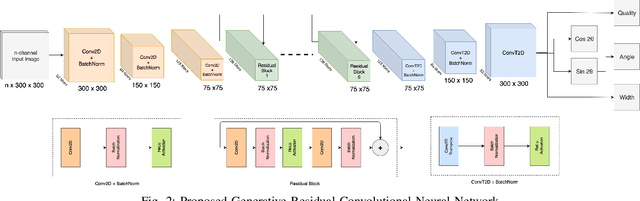
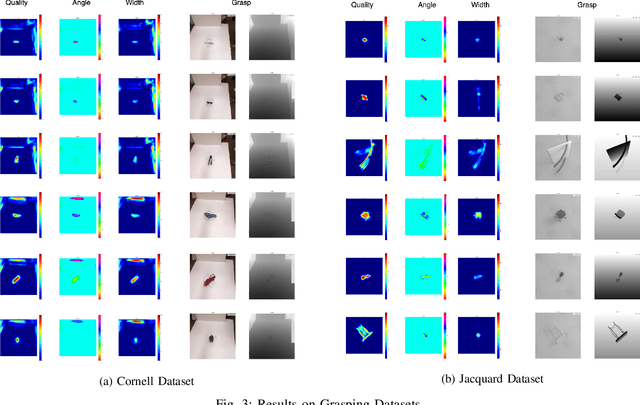
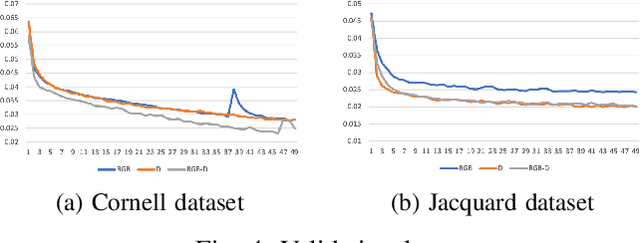
In this paper, we tackle the problem of generating antipodal robotic grasps for unknown objects from n-channel image of the scene. We propose a novel Generative Residual Convolutional Neural Network (GR-ConvNet) model that can generate robust antipodal grasps from n-channel input at realtime speeds (~20ms). We evaluate the proposed model architecture on standard datasets and previously unseen household objects. We achieved state-of-the-art accuracy of 97.7% and 94.6% on Cornell and Jacquard grasping datasets respectively. We also demonstrate a 93.5% grasp success rate on previously unseen real-world objects. Our open-source implementation of GR-ConvNet can be found at github.com/skumra/robotic-grasping.
* 8 pages, 5 figures, Submitted to RA-L and ICRA 2020
View paper on