Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAngular Center of Mass for Humanoid Robots
Paper and Code
Oct 14, 2022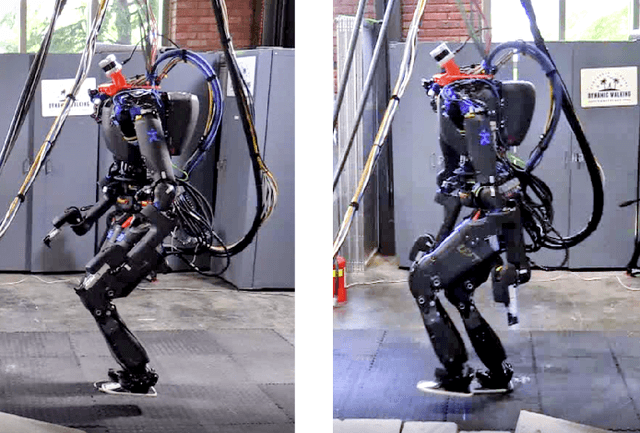
The center of mass (CoM) has been widely used in planning and control for humanoid locomotion, because it carries key information about the position of a robot. In contrast, an ''angular center of mass'' (ACoM), which provides an ''average'' orientation of a robot, is less well-known in the community, although the concept has been in the literature for about a decade. In this paper, we introduce the ACoM from a CoM perspective. We optimize for an ACoM on the humanoid robot Nadia, and demonstrate its application in walking with natural upper body motion on hardware.
View paper on