 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Unsupervised Optical Flow Estimation For LiDAR Image Sequences
Paper and Code
May 28, 2021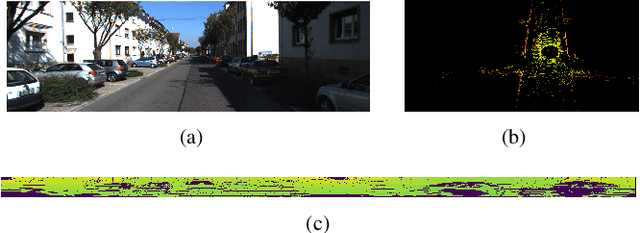
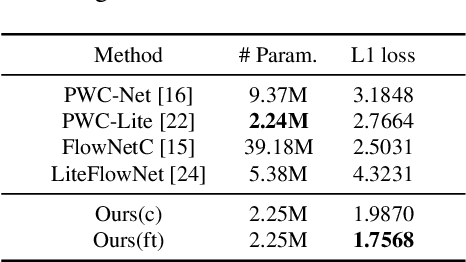

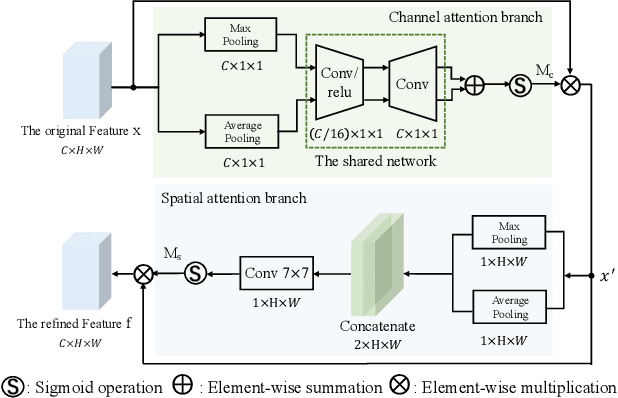
In recent years, the LiDAR images, as a 2D compact representation of 3D LiDAR point clouds, are widely applied in various tasks, e.g., 3D semantic segmentation, LiDAR point cloud compression (PCC). Among these works, the optical flow estimation for LiDAR image sequences has become a key issue, especially for the motion estimation of the inter prediction in PCC. However, the existing optical flow estimation models are likely to be unreliable for LiDAR images. In this work, we first propose a light-weight flow estimation model for LiDAR image sequences. The key novelty of our method lies in two aspects. One is that for the different characteristics (with the spatial-variation feature distribution) of the LiDAR images w.r.t. the normal color images, we introduce the attention mechanism into our model to improve the quality of the estimated flow. The other one is that to tackle the lack of large-scale LiDAR-image annotations, we present an unsupervised method, which directly minimizes the inconsistency between the reference image and the reconstructed image based on the estimated optical flow. Extensive experimental results have shown that our proposed model outperforms other mainstream models on the KITTI dataset, with much fewer parameters.