 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Underwater SLAM System using Sonar, Visual, Inertial, and Depth Sensor
Paper and Code
Mar 15, 2019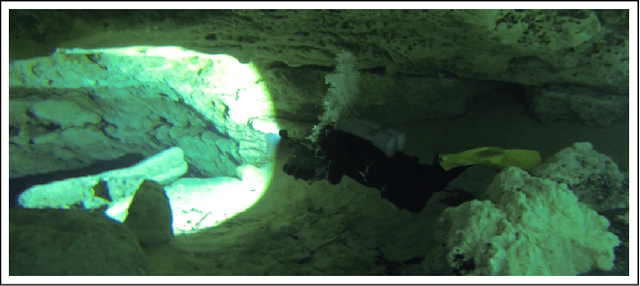
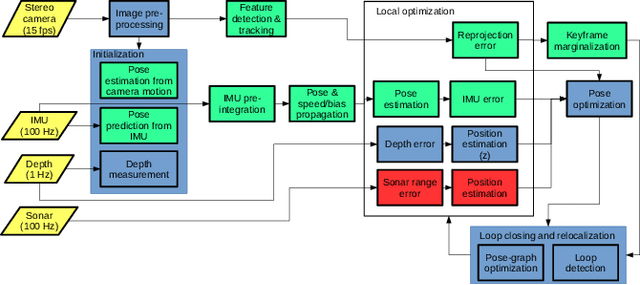
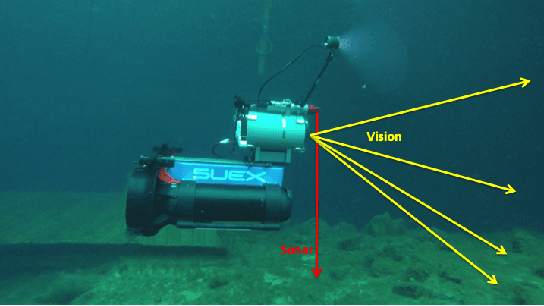
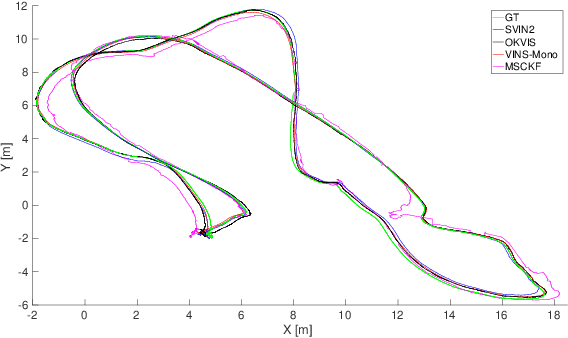
This paper presents a novel tightly-coupled keyframe-based Simultaneous Localization and Mapping (SLAM) system with loop-closing and relocalization capabilities targeted for the underwater domain. Our previous work, SVIn, augmented the state-of-the-art visual-inertial state estimation package OKVIS to accommodate acoustic data from sonar in a non-linear optimization-based framework. This paper addresses drift and loss of localization -- one of the main problems affecting other packages in underwater domain -- by providing the following main contributions: a robust initialization method to refine scale using depth measurements, a fast preprocessing step to enhance the image quality, and a real-time loop-closing and relocalization method using bag of words (BoW). An additional contribution is the addition of depth measurements from a pressure sensor to the tightly-coupled optimization formulation. Experimental results on datasets collected with a custom-made underwater sensor suite and an autonomous underwater vehicle from challenging underwater environments with poor visibility demonstrate performance never achieved before in terms of accuracy and robustness.