 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Online Learning System for Wireless Charging Alignment using Surround-view Fisheye Cameras
Paper and Code
May 26, 2021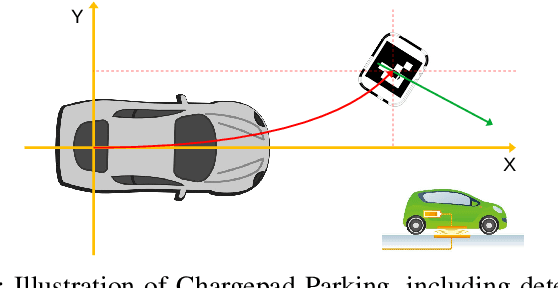
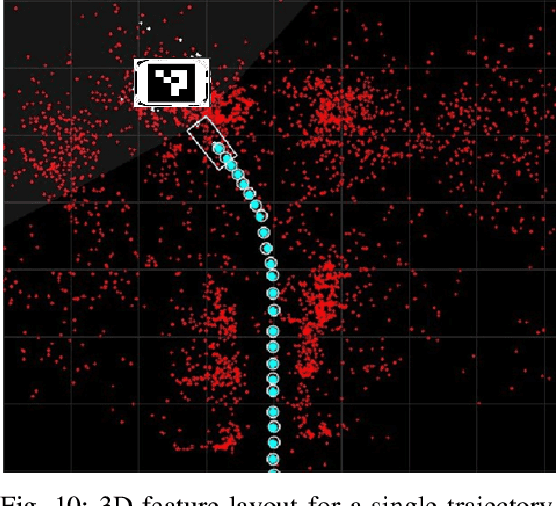
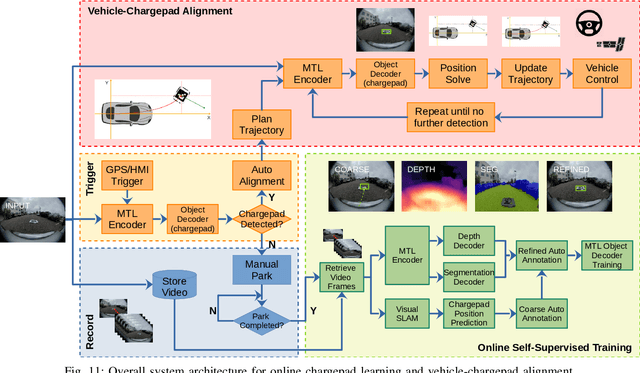

Electric Vehicles are increasingly common, with inductive chargepads being considered a convenient and efficient means of charging electric vehicles. However, drivers are typically poor at aligning the vehicle to the necessary accuracy for efficient inductive charging, making the automated alignment of the two charging plates desirable. In parallel to the electrification of the vehicular fleet, automated parking systems that make use of surround-view camera systems are becoming increasingly popular. In this work, we propose a system based on the surround-view camera architecture to detect, localize and automatically align the vehicle with the inductive chargepad. The visual design of the chargepads is not standardized and not necessarily known beforehand. Therefore a system that relies on offline training will fail in some situations. Thus we propose an online learning method that leverages the driver's actions when manually aligning the vehicle with the chargepad and combine it with weak supervision from semantic segmentation and depth to learn a classifier to auto-annotate the chargepad in the video for further training. In this way, when faced with a previously unseen chargepad, the driver needs only manually align the vehicle a single time. As the chargepad is flat on the ground, it is not easy to detect it from a distance. Thus, we propose using a Visual SLAM pipeline to learn landmarks relative to the chargepad to enable alignment from a greater range. We demonstrate the working system on an automated vehicle as illustrated in the video https://youtu.be/_cLCmkW4UYo. To encourage further research, we will share a chargepad dataset used in this work.