 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Intelligent Safety System for Human-Centered Semi-Autonomous Vehicles
Paper and Code
Feb 20, 2019
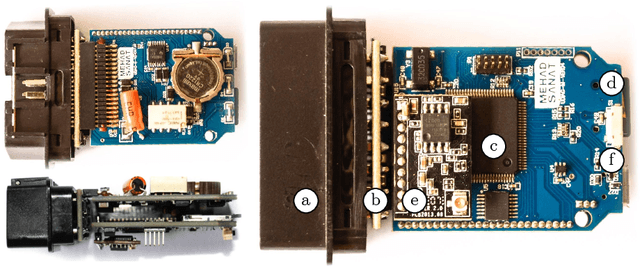
Nowadays, automobile manufacturers make efforts to develop ways to make cars fully safe. Monitoring driver's actions by computer vision techniques to detect driving mistakes in real-time and then planning for autonomous driving to avoid vehicle collisions is one of the most important issues that has been investigated in the machine vision and Intelligent Transportation Systems (ITS). The main goal of this study is to prevent accidents caused by fatigue, drowsiness, and driver distraction. To avoid these incidents, this paper proposes an integrated safety system that continuously monitors the driver's attention and vehicle surroundings, and finally decides whether the actual steering control status is safe or not. For this purpose, we equipped an ordinary car called FARAZ with a vision system consisting of four mounted cameras along with a universal car tool for communicating with surrounding factory-installed sensors and other car systems, and sending commands to actuators. The proposed system leverages a scene understanding pipeline using deep convolutional encoder-decoder networks and a driver state detection pipeline. We have been identifying and assessing domestic capabilities for the development of technologies specifically of the ordinary vehicles in order to manufacture smart cars and eke providing an intelligent system to increase safety and to assist the driver in various conditions/situations.