 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Inertial Block Majorization Minimization Framework for Nonsmooth Nonconvex Optimization
Paper and Code
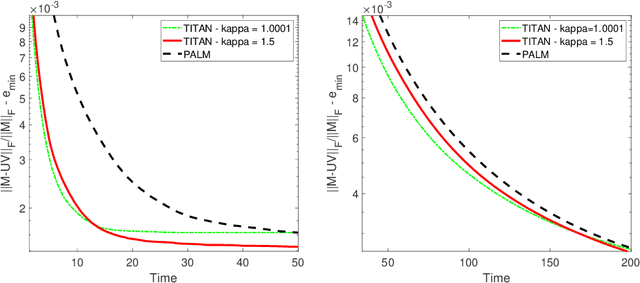
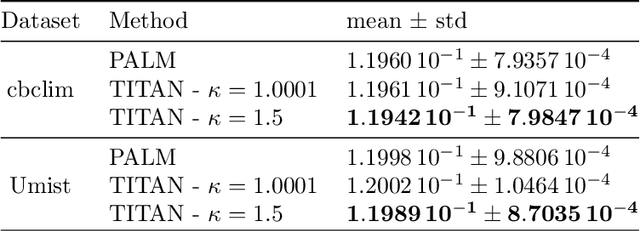
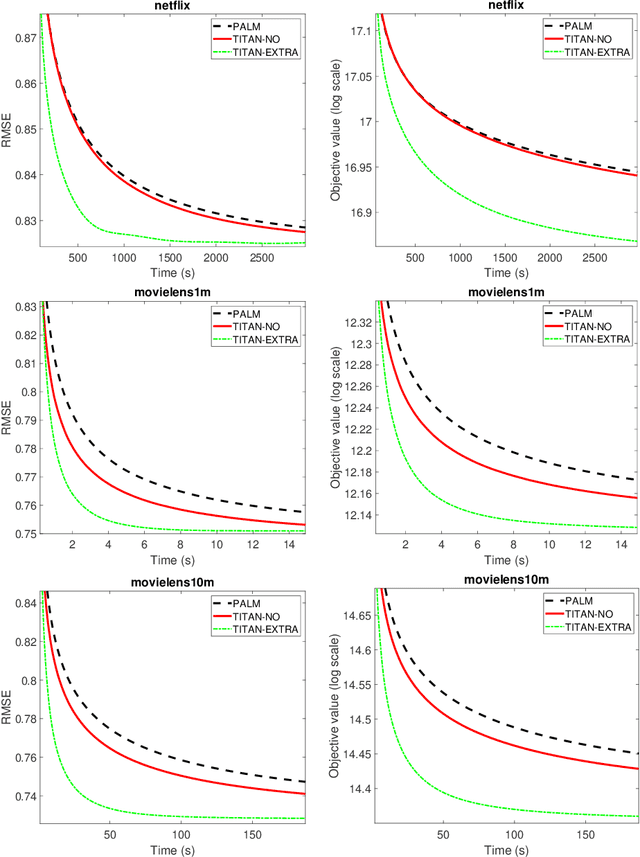

In this paper, we introduce TITAN, a novel inerTial block majorIzation minimization framework for non-smooth non-convex opTimizAtioN problems. TITAN is a block coordinate method (BCM) that embeds inertial force to each majorization-minimization step of the block updates. The inertial force is obtained via an extrapolation operator that subsumes heavy-ball and Nesterov-type accelerations for block proximal gradient methods as special cases. By choosing various surrogate functions, such as proximal, Lipschitz gradient, Bregman, quadratic, and composite surrogate functions, and by varying the extrapolation operator, TITAN produces a rich set of inertial BCMs. We study sub-sequential convergence as well as global convergence for the generated sequence of TITAN. We illustrate the effectiveness of TITAN on two important machine learning problems, namely sparse non-negative matrix factorization and matrix completion.