 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Experimental Comparison of Floating Base Estimators for Humanoid Robots with Flat Feet
Paper and Code
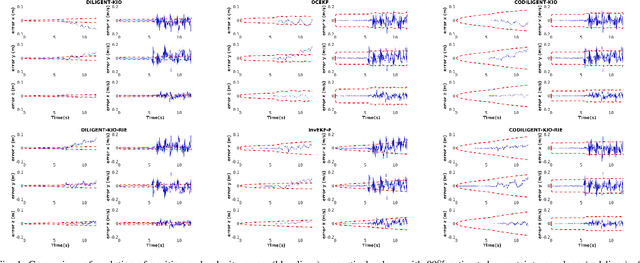
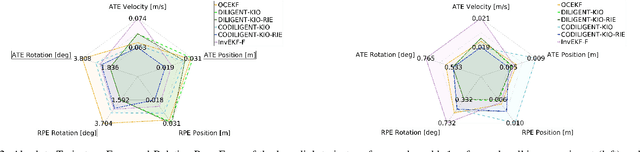
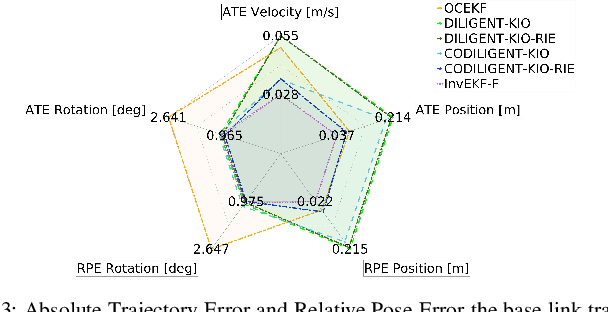
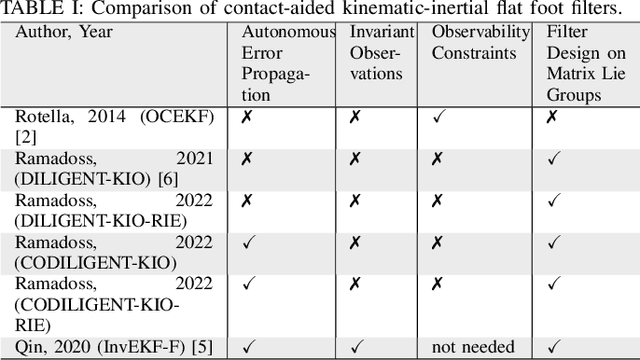
Extended Kalman filtering is a common approach to achieve floating base estimation of a humanoid robot. These filters rely on measurements from an Inertial Measurement Unit (IMU) and relative forward kinematics for estimating the base position-and-orientation and its linear velocity along with the augmented states of feet position-and-orientation, thus giving them their name, flat-foot filters. However, the availability of only partial measurements often poses the question of consistency in the filter design. In this paper, we perform an experimental comparison of state-of-the-art flat-foot filters based on the representation choice of state, observation, matrix Lie group error and system dynamics evaluated for filter consistency and trajectory errors. The comparison is performed over simulated and real-world experiments conducted on the iCub humanoid platform.