 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn End-to-end Deep Reinforcement Learning Approach for the Long-term Short-term Planning on the Frenet Space
Paper and Code
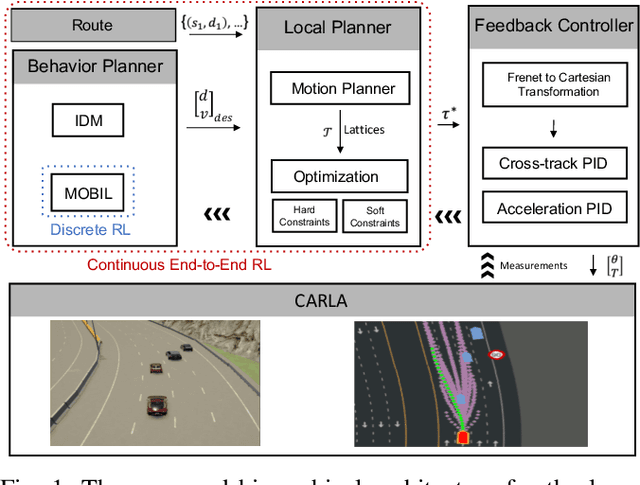
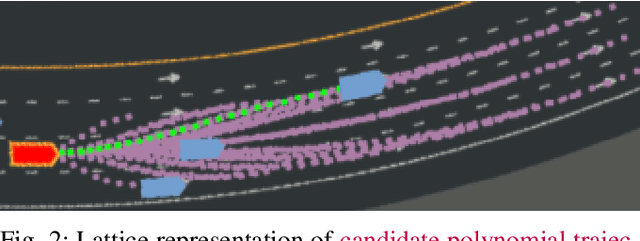
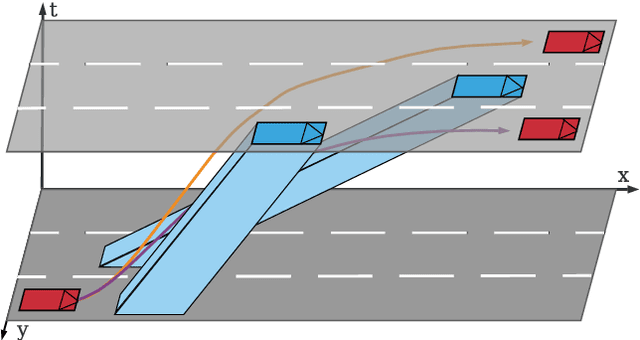
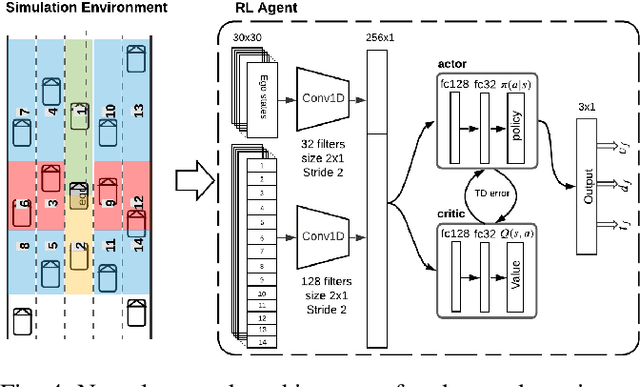
Tactical decision making and strategic motion planning for autonomous highway driving are challenging due to the complication of predicting other road users' behaviors, diversity of environments, and complexity of the traffic interactions. This paper presents a novel end-to-end continuous deep reinforcement learning approach towards autonomous cars' decision-making and motion planning. For the first time, we define both states and action spaces on the Frenet space to make the driving behavior less variant to the road curvatures than the surrounding actors' dynamics and traffic interactions. The agent receives time-series data of past trajectories of the surrounding vehicles and applies convolutional neural networks along the time channels to extract features in the backbone. The algorithm generates continuous spatiotemporal trajectories on the Frenet frame for the feedback controller to track. Extensive high-fidelity highway simulations on CARLA show the superiority of the presented approach compared with commonly used baselines and discrete reinforcement learning on various traffic scenarios. Furthermore, the proposed method's advantage is confirmed with a more comprehensive performance evaluation against 1000 randomly generated test scenarios.