 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn efficient Deep Spatio-Temporal Context Aware decision Network (DST-CAN) for Predictive Manoeuvre Planning
Paper and Code

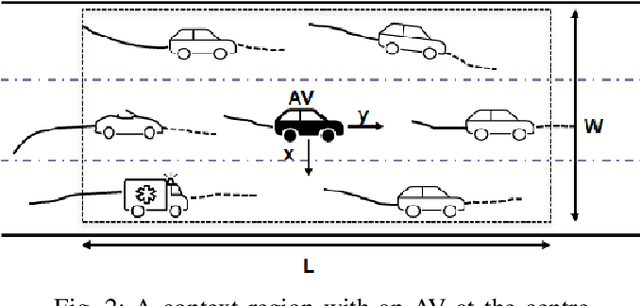

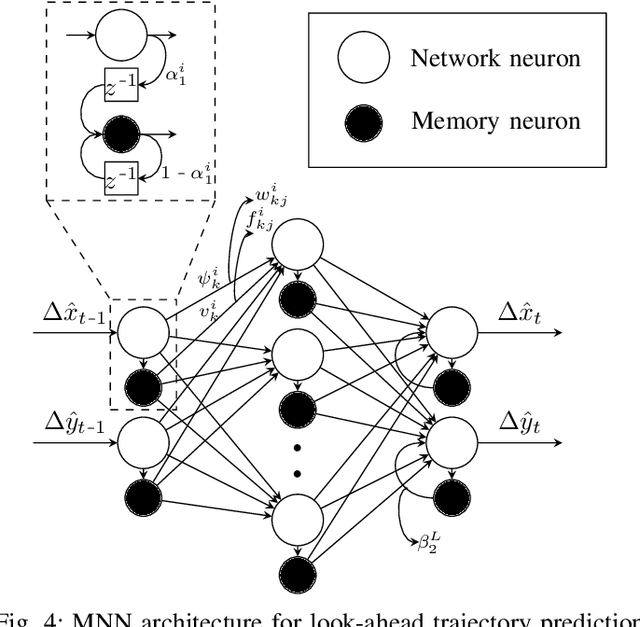
To ensure the safety and efficiency of its maneuvers, an Autonomous Vehicle (AV) should anticipate the future intentions of surrounding vehicles using its sensor information. If an AV can predict its surrounding vehicles' future trajectories, it can make safe and efficient manoeuvre decisions. In this paper, we present such a Deep Spatio-Temporal Context-Aware decision Network (DST-CAN) model for predictive manoeuvre planning of AVs. A memory neuron network is used to predict future trajectories of its surrounding vehicles. The driving environment's spatio-temporal information (past, present, and predicted future trajectories) are embedded into a context-aware grid. The proposed DST-CAN model employs these context-aware grids as inputs to a convolutional neural network to understand the spatial relationships between the vehicles and determine a safe and efficient manoeuvre decision. The DST-CAN model also uses information of human driving behavior on a highway. Performance evaluation of DST-CAN has been carried out using two publicly available NGSIM US-101 and I-80 datasets. Also, rule-based ground truth decisions have been compared with those generated by DST-CAN. The results clearly show that DST-CAN can make much better decisions with 3-sec of predicted trajectories of neighboring vehicles compared to currently existing methods that do not use this prediction.