 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Attention-guided Multistream Feature Fusion Network for Localization of Risky Objects in Driving Videos
Paper and Code
Sep 16, 2022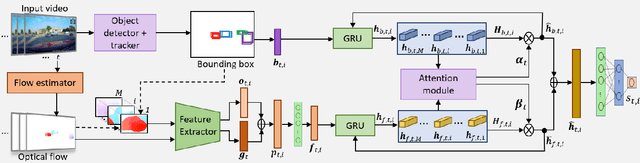
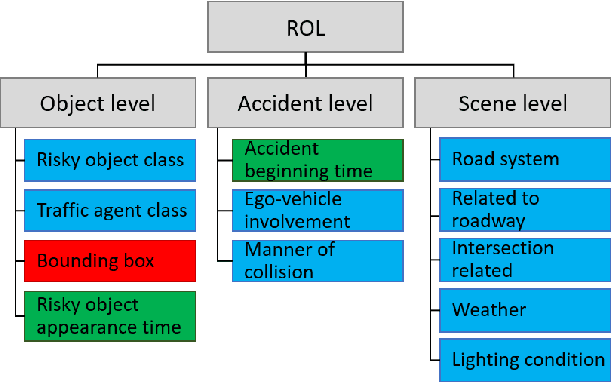
Detecting dangerous traffic agents in videos captured by vehicle-mounted dashboard cameras (dashcams) is essential to facilitate safe navigation in a complex environment. Accident-related videos are just a minor portion of the driving video big data, and the transient pre-accident processes are highly dynamic and complex. Besides, risky and non-risky traffic agents can be similar in their appearance. These make risky object localization in the driving video particularly challenging. To this end, this paper proposes an attention-guided multistream feature fusion network (AM-Net) to localize dangerous traffic agents from dashcam videos. Two Gated Recurrent Unit (GRU) networks use object bounding box and optical flow features extracted from consecutive video frames to capture spatio-temporal cues for distinguishing dangerous traffic agents. An attention module coupled with the GRUs learns to attend to the traffic agents relevant to an accident. Fusing the two streams of features, AM-Net predicts the riskiness scores of traffic agents in the video. In supporting this study, the paper also introduces a benchmark dataset called Risky Object Localization (ROL). The dataset contains spatial, temporal, and categorical annotations with the accident, object, and scene-level attributes. The proposed AM-Net achieves a promising performance of 85.73% AUC on the ROL dataset. Meanwhile, the AM-Net outperforms current state-of-the-art for video anomaly detection by 6.3% AUC on the DoTA dataset. A thorough ablation study further reveals AM-Net's merits by evaluating the contributions of its different components.