 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeALLSTEPS: Curriculum-driven Learning of Stepping Stone Skills
Paper and Code
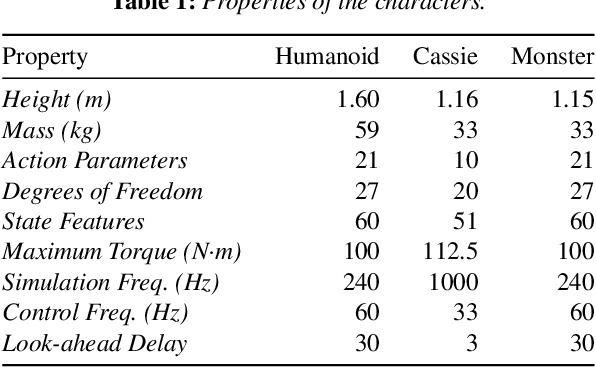
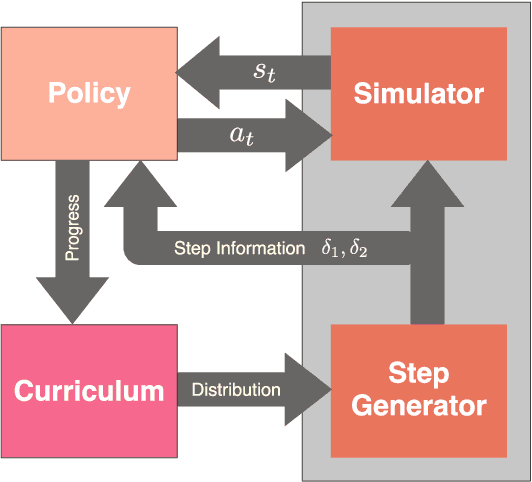
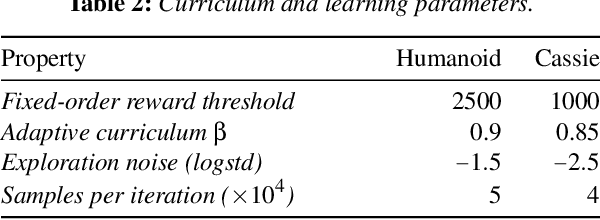
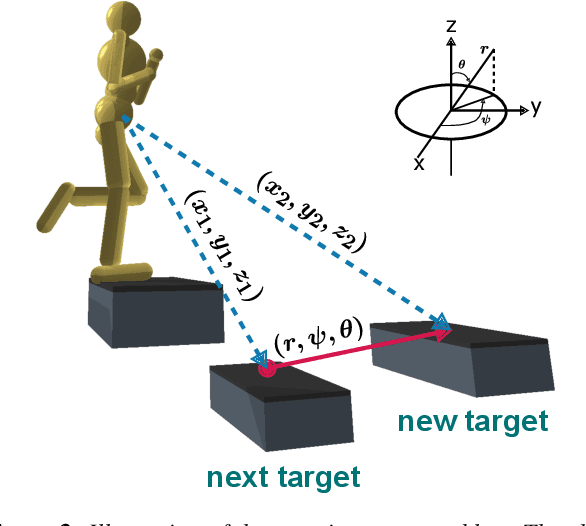
Humans are highly adept at walking in environments with foot placement constraints, including stepping-stone scenarios where the footstep locations are fully constrained. Finding good solutions to stepping-stone locomotion is a longstanding and fundamental challenge for animation and robotics. We present fully learned solutions to this difficult problem using reinforcement learning. We demonstrate the importance of a curriculum for efficient learning and evaluate four possible curriculum choices compared to a non-curriculum baseline. Results are presented for a simulated human character, a realistic bipedal robot simulation and a monster character, in each case producing robust, plausible motions for challenging stepping stone sequences and terrains.