 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll-in-One: A DRL-based Control Switch Combining State-of-the-art Navigation Planners
Paper and Code
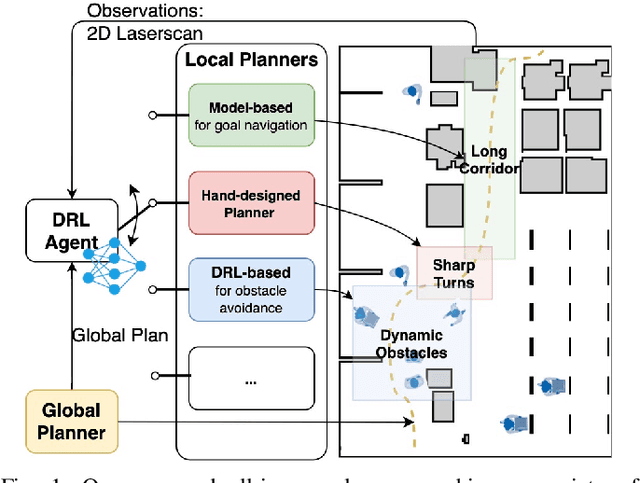
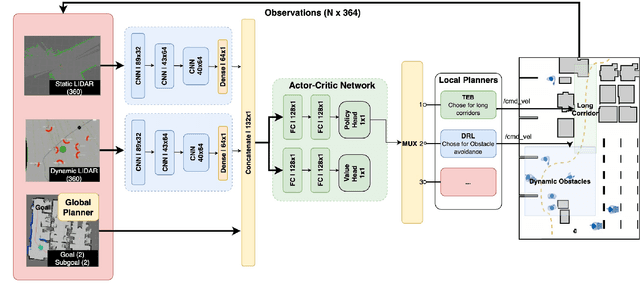
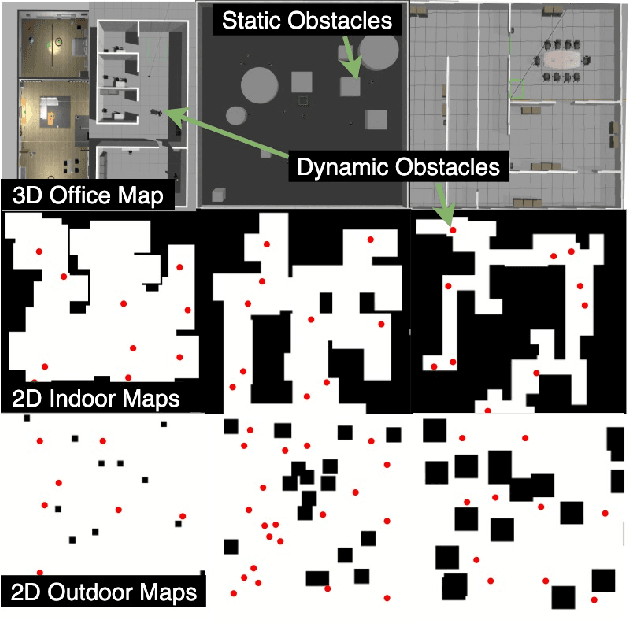

Autonomous navigation of mobile robots is an essential aspect in use cases such as delivery, assistance or logistics. Although traditional planning methods are well integrated into existing navigation systems, they struggle in highly dynamic environments. On the other hand, Deep-Reinforcement-Learning-based methods show superior performance in dynamic obstacle avoidance but are not suitable for long-range navigation and struggle with local minima. In this paper, we propose a Deep-Reinforcement-Learning-based control switch, which has the ability to select between different planning paradigms based solely on sensor data observations. Therefore, we develop an interface to efficiently operate multiple model-based, as well as learning-based local planners and integrate a variety of state-of-the-art planners to be selected by the control switch. Subsequently, we evaluate our approach against each planner individually and found improvements in navigation performance especially for highly dynamic scenarios. Our planner was able to prefer learning-based approaches in situations with a high number of obstacles while relying on the traditional model-based planners in long corridors or empty spaces.