 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirLoop: Lifelong Loop Closure Detection
Paper and Code
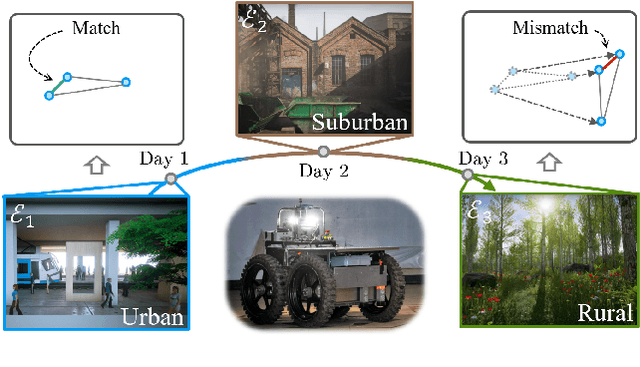
Loop closure detection is an important building block that ensures the accuracy and robustness of simultaneous localization and mapping (SLAM) systems. Due to their generalization ability, CNN-based approaches have received increasing attention. Although they normally benefit from training on datasets that are diverse and reflective of the environments, new environments often emerge after the model is deployed. It is therefore desirable to incorporate the data newly collected during operation for incremental learning. Nevertheless, simply finetuning the model on new data is infeasible since it may cause the model's performance on previously learned data to degrade over time, which is also known as the problem of catastrophic forgetting. In this paper, we present AirLoop, a method that leverages techniques from lifelong learning to minimize forgetting when training loop closure detection models incrementally. We experimentally demonstrate the effectiveness of AirLoop on TartanAir, Nordland, and RobotCar datasets. To the best of our knowledge, AirLoop is one of the first works to achieve lifelong learning of deep loop closure detectors.