Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAggressive Deep Driving: Model Predictive Control with a CNN Cost Model
Paper and Code
Jul 17, 2017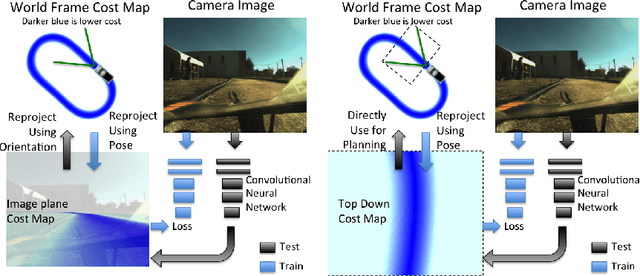

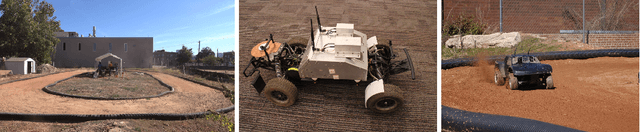
We present a framework for vision-based model predictive control (MPC) for the task of aggressive, high-speed autonomous driving. Our approach uses deep convolutional neural networks to predict cost functions from input video which are directly suitable for online trajectory optimization with MPC. We demonstrate the method in a high speed autonomous driving scenario, where we use a single monocular camera and a deep convolutional neural network to predict a cost map of the track in front of the vehicle. Results are demonstrated on a 1:5 scale autonomous vehicle given the task of high speed, aggressive driving.
* 11 pages, 7 figures
View paper on