 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent-Centric Risk Assessment: Accident Anticipation and Risky Region Localization
Paper and Code
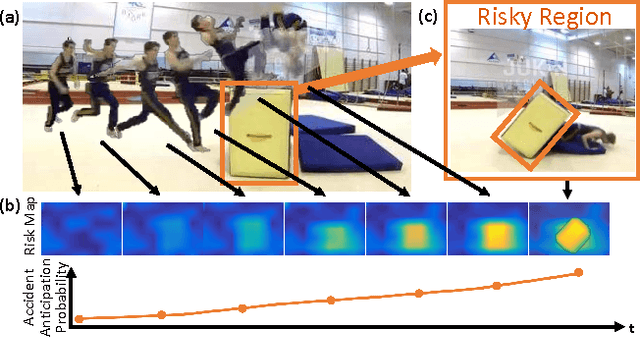
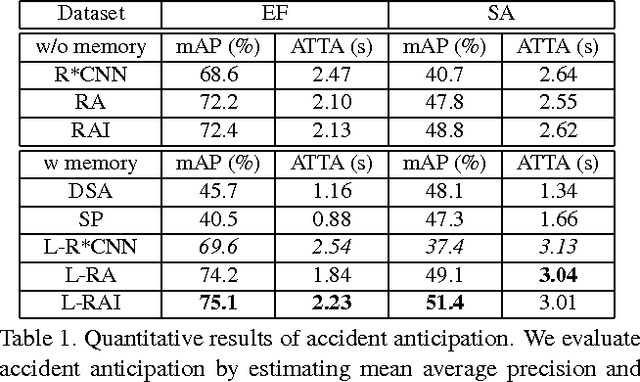
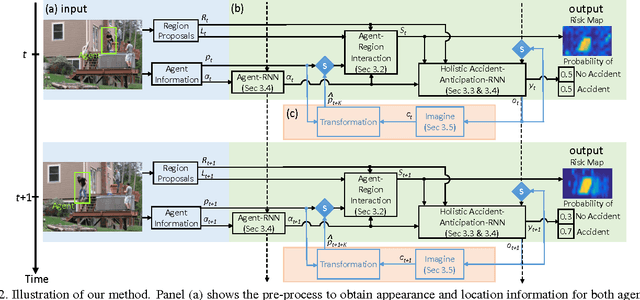
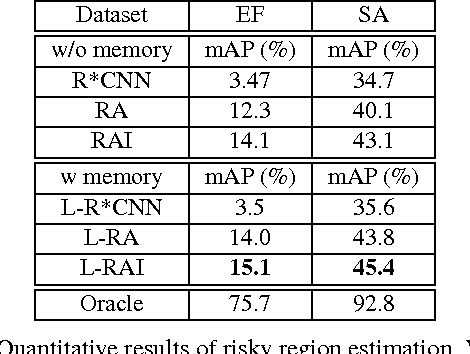
For survival, a living agent must have the ability to assess risk (1) by temporally anticipating accidents before they occur, and (2) by spatially localizing risky regions in the environment to move away from threats. In this paper, we take an agent-centric approach to study the accident anticipation and risky region localization tasks. We propose a novel soft-attention Recurrent Neural Network (RNN) which explicitly models both spatial and appearance-wise non-linear interaction between the agent triggering the event and another agent or static-region involved. In order to test our proposed method, we introduce the Epic Fail (EF) dataset consisting of 3000 viral videos capturing various accidents. In the experiments, we evaluate the risk assessment accuracy both in the temporal domain (accident anticipation) and spatial domain (risky region localization) on our EF dataset and the Street Accident (SA) dataset. Our method consistently outperforms other baselines on both datasets.