 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarially Tuned Scene Generation
Paper and Code
Jul 07, 2017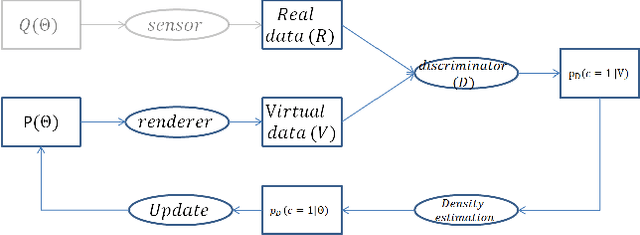
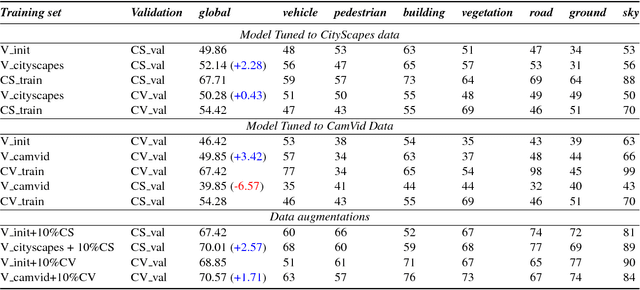
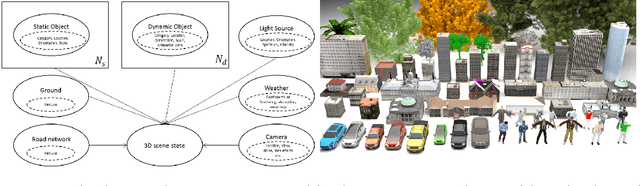

Generalization performance of trained computer vision systems that use computer graphics (CG) generated data is not yet effective due to the concept of 'domain-shift' between virtual and real data. Although simulated data augmented with a few real world samples has been shown to mitigate domain shift and improve transferability of trained models, guiding or bootstrapping the virtual data generation with the distributions learnt from target real world domain is desired, especially in the fields where annotating even few real images is laborious (such as semantic labeling, and intrinsic images etc.). In order to address this problem in an unsupervised manner, our work combines recent advances in CG (which aims to generate stochastic scene layouts coupled with large collections of 3D object models) and generative adversarial training (which aims train generative models by measuring discrepancy between generated and real data in terms of their separability in the space of a deep discriminatively-trained classifier). Our method uses iterative estimation of the posterior density of prior distributions for a generative graphical model. This is done within a rejection sampling framework. Initially, we assume uniform distributions as priors on the parameters of a scene described by a generative graphical model. As iterations proceed the prior distributions get updated to distributions that are closer to the (unknown) distributions of target data. We demonstrate the utility of adversarially tuned scene generation on two real-world benchmark datasets (CityScapes and CamVid) for traffic scene semantic labeling with a deep convolutional net (DeepLab). We realized performance improvements by 2.28 and 3.14 points (using the IoU metric) between the DeepLab models trained on simulated sets prepared from the scene generation models before and after tuning to CityScapes and CamVid respectively.