 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial point perturbations on 3D objects
Paper and Code
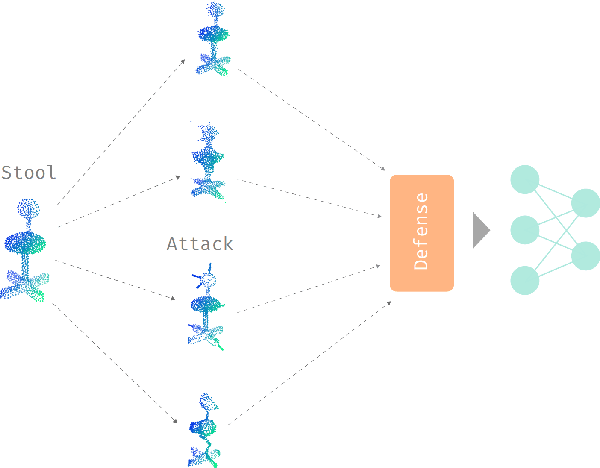
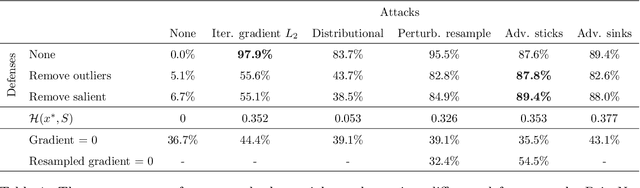
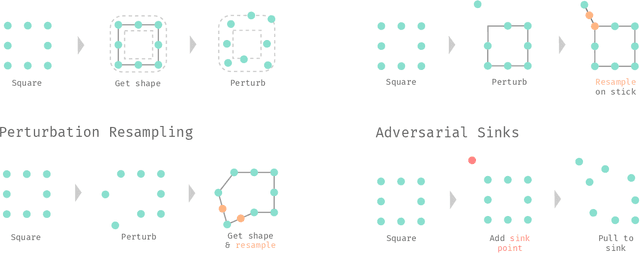
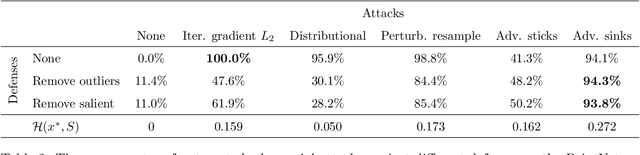
The importance of training robust neural network grows as 3D data is increasingly utilized in deep learning for vision tasks, like autonomous driving. We examine this problem from the perspective of the attacker, which is necessary in understanding how neural networks can be exploited, and thus defended. More specifically, we propose adversarial attacks based on solving different optimization problems, like minimizing the perceptibility of our generated adversarial examples, or maintaining a uniform density distribution of points across the adversarial object surfaces. Our four proposed algorithms for attacking 3D point cloud classification are all highly successful on existing neural networks, and we find that some of them are even effective against previously proposed point removal defenses.